This project is to design and build a robot to compete in IEEE’s 2018 SoutheastCon hardware competition. The robot is designed to complete various tasks on a competition playing field autonomously. This means once the robot is powered on it will navigate and complete the tasks on the competition playing field without human interference. Tasks the robot must complete include pressing buttons, pushing levers, and securing a payload. Optionally, the robot can turn a wheel a set number of rotations to earn bonus points. The robot must complete the listed tasks in an order that is specified at the beginning of a round of play. These directions are sent via an IR signal and can be one of 8 unique sets. The primary goal of the robot design is to maximize the amount of points the robot will earn during a round of play. This year’s competition is pirate themed and there is also an opportunity for bonus points by having a team flag and t-shirt.

Team Leader

Financial Advisor

Lead Mechanical Engineer

Lead Electrical Engineer

Lead Computer Engineer

Lead Programmer
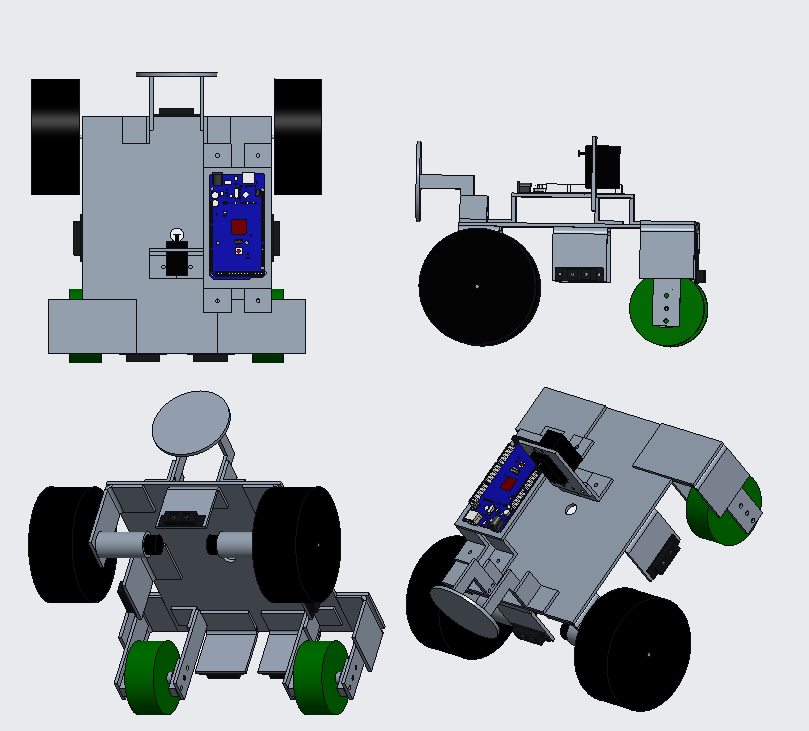
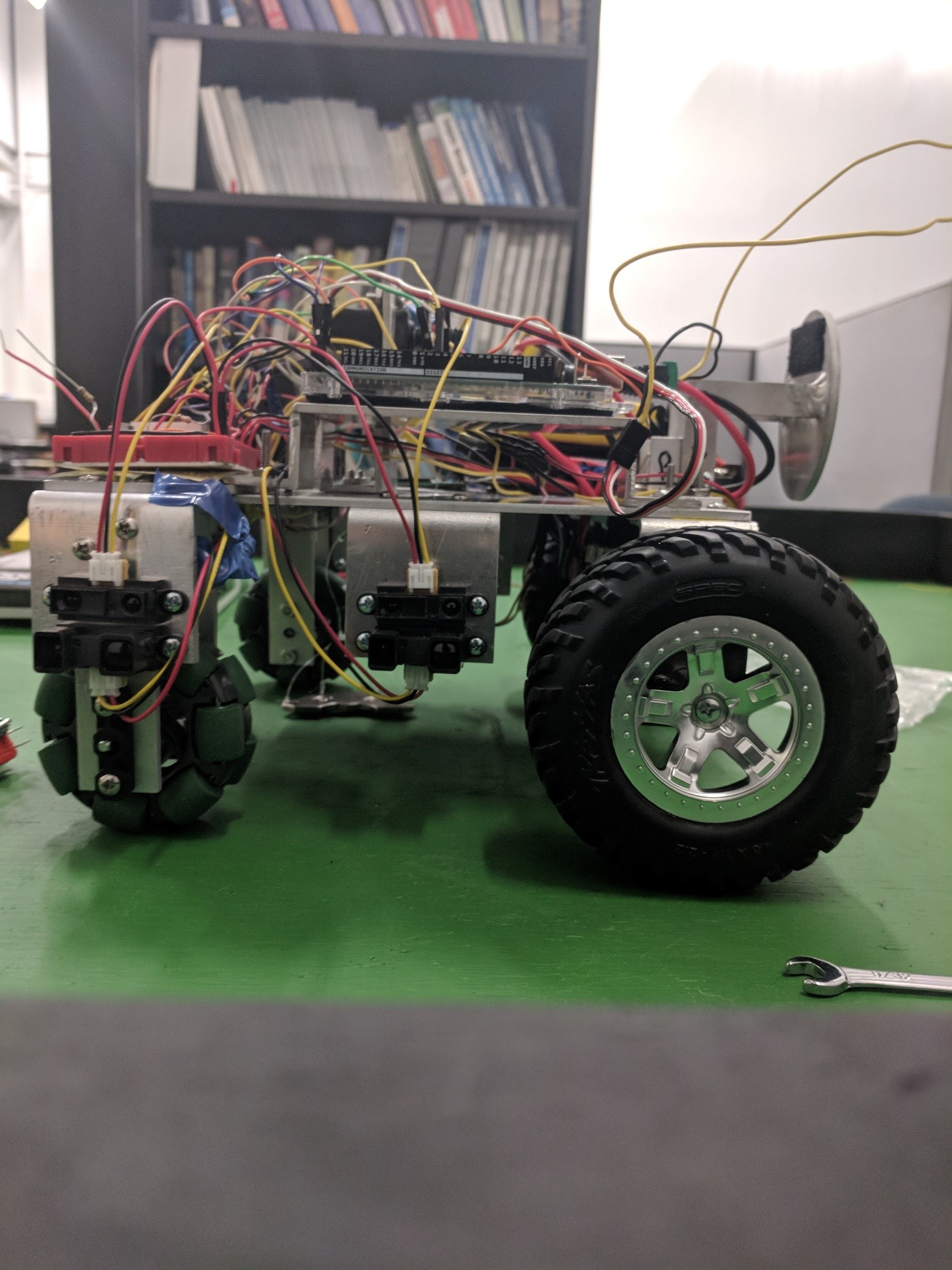
The robot will be equipped with an IR receiver that will receive the IR signal blast at the beginning of a round of competition. It will then interpret this signal and navigate the course accordingly. The robot will be driven by two DC motors with high-grip rubber drive wheels. The rear wheels are omni-directional to allow greater stability while the robot rotates. Orientation and distance from course boundaries will be determined using data from IR sensors mounted on all sides of the robot. All of the sensors are controlled with an Arduino Mega microcontroller.
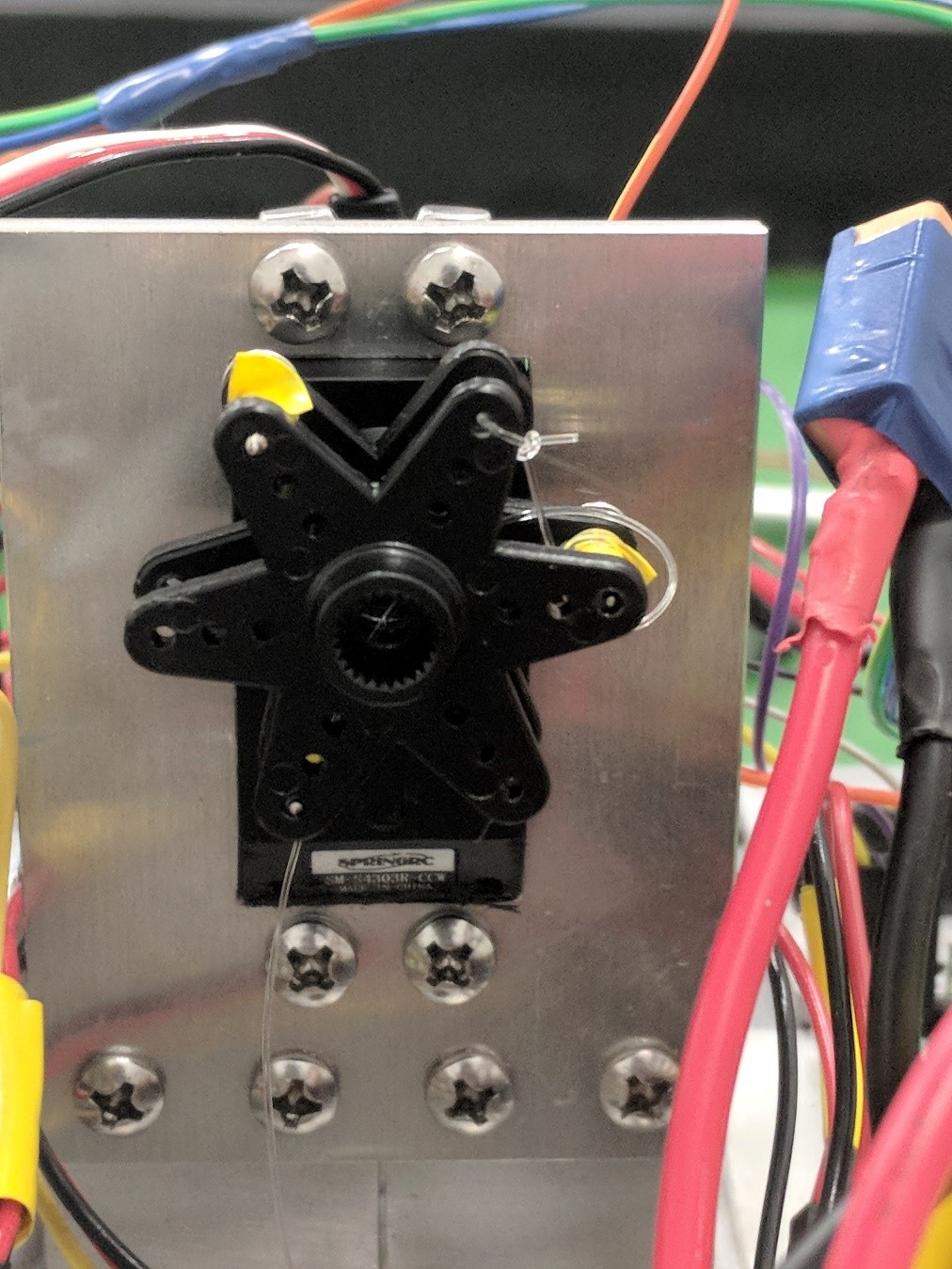
The chassis of the robot was designed to accommodate rigid mounted pusher arms and bars that could interact with the buttons and levers on the arena. To secure the payload, a magnet attached to a high-torque servo motor will lift and secure the box to the underside of the robot.
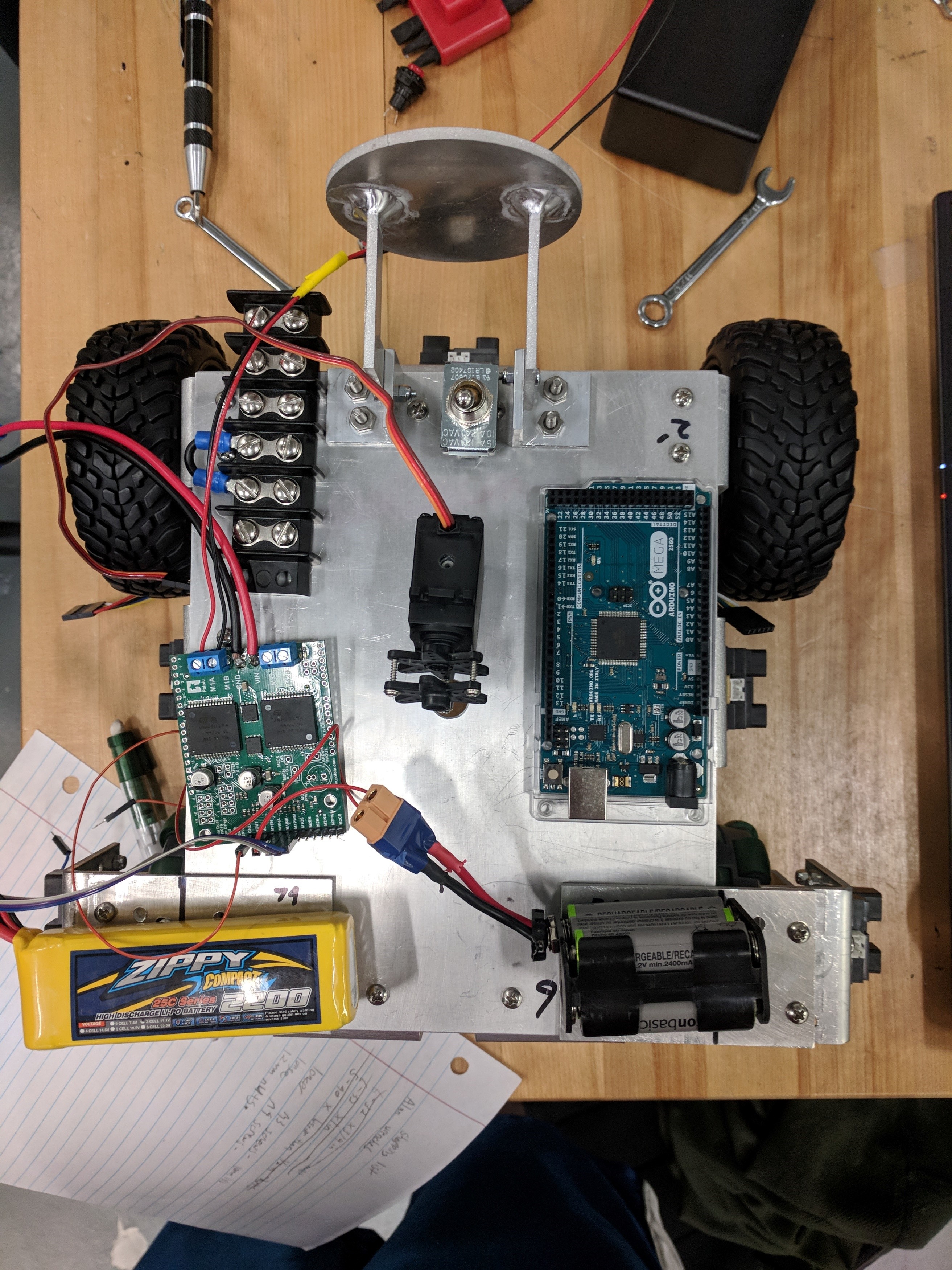
To control the components of the robot, an Arduino Mega was utilized. The large number of analog and digital pins could accommodate the required number of sensors and other components.
CAD of Robot
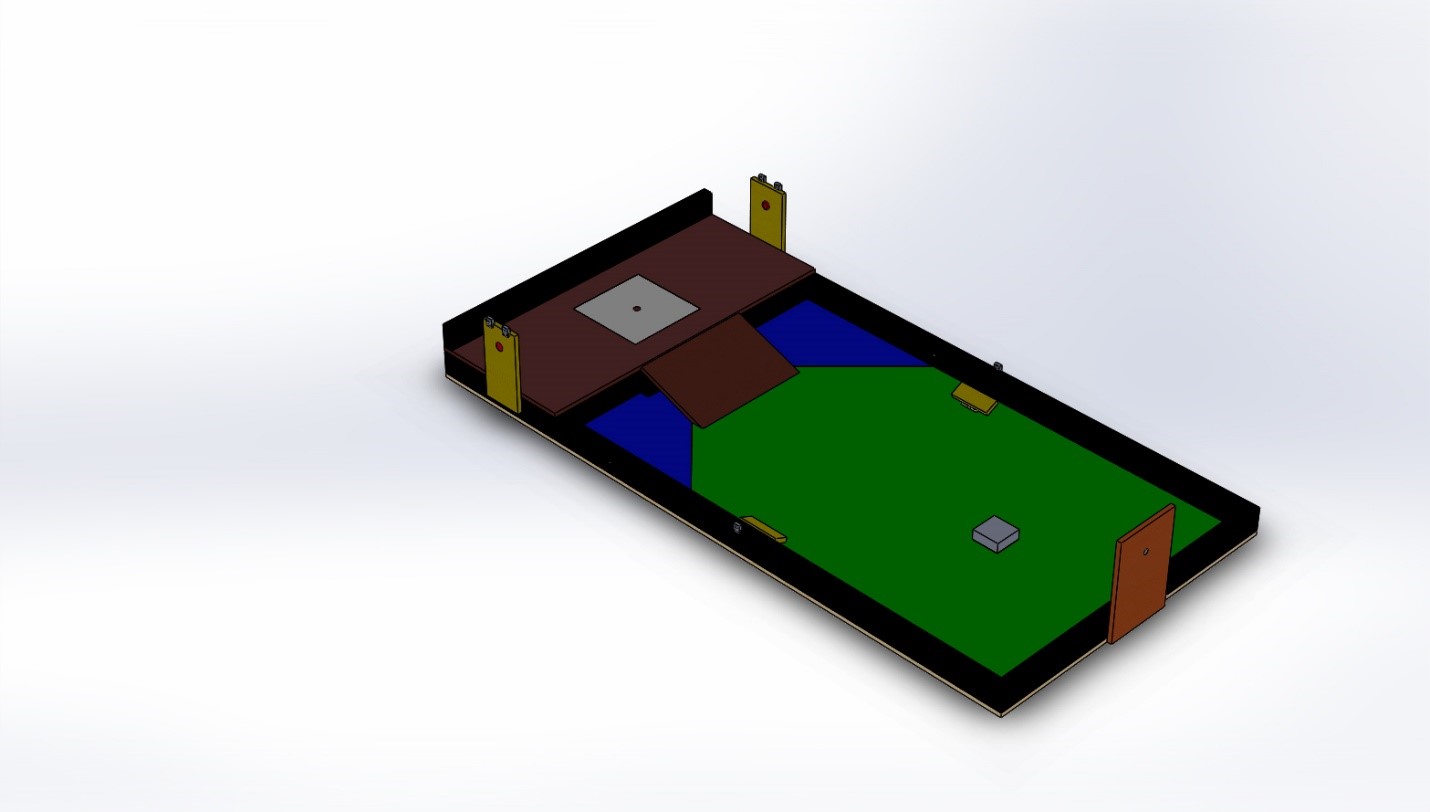
Playing field
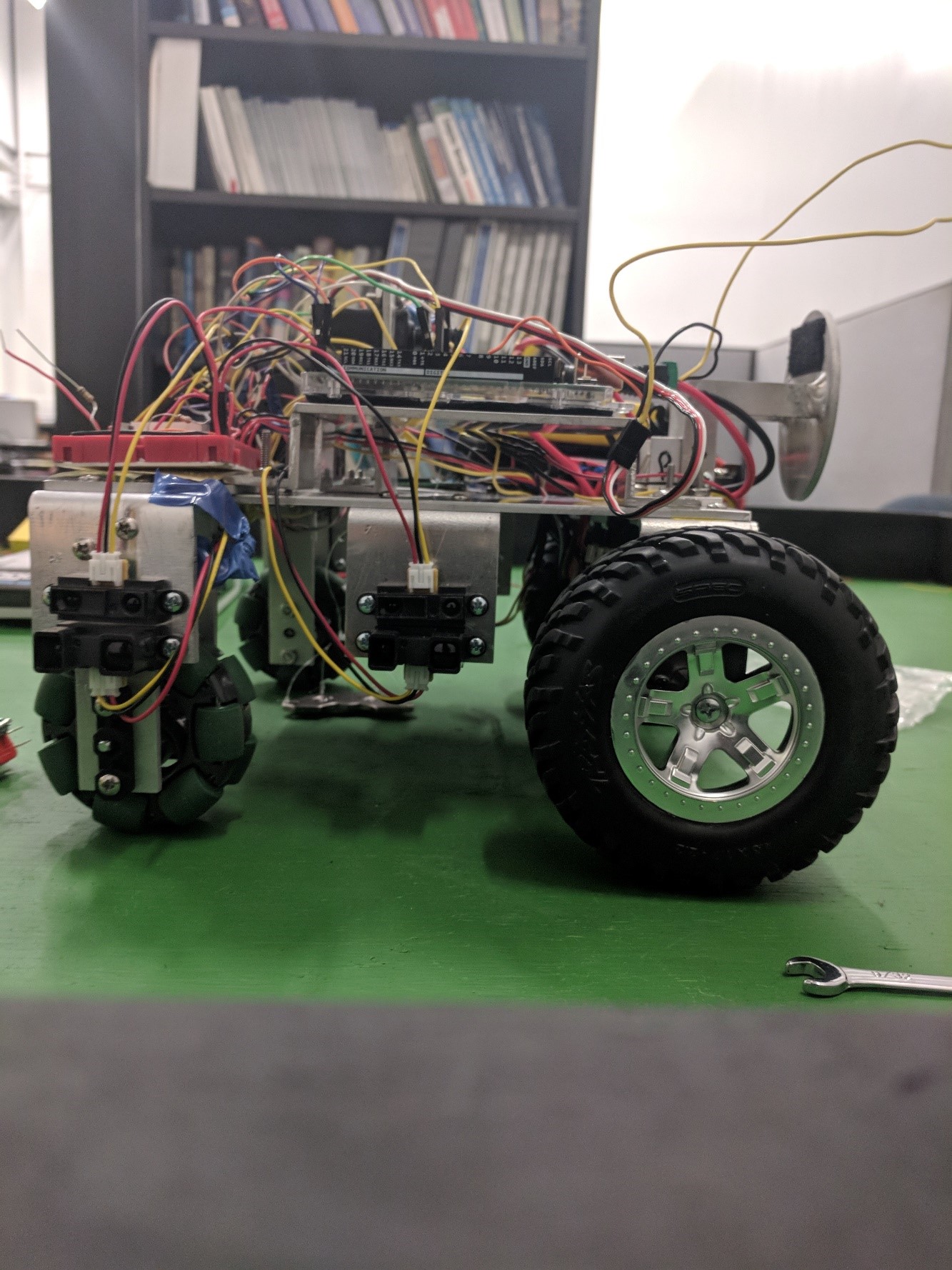
Side view

Wheels