Remote controlled vehicle controllers have increased in range and portability over the past years. Controllers
currently on the market lack the feedback the user usually feels when controlling a real vehicle. Sponsored by
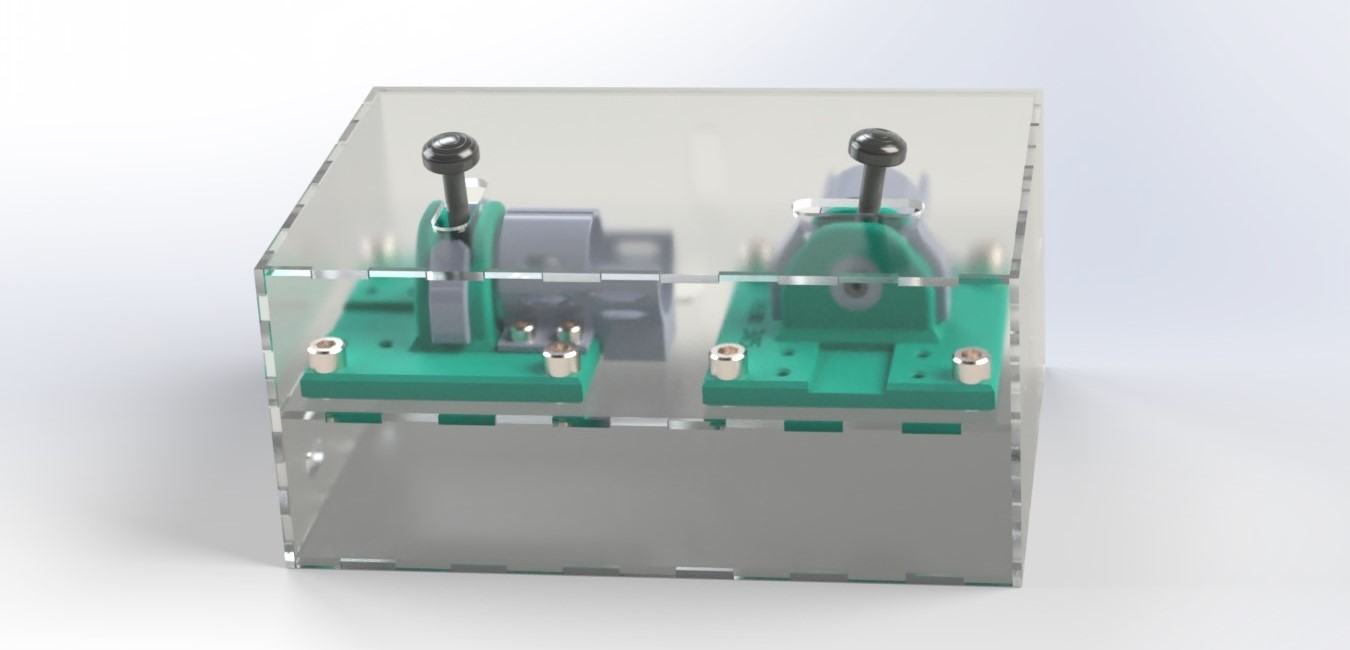
The College of Engineering, our project is to build a controller that gives the user physical feedback related
to what the vehicle is experiencing. The feedback received allows for the user to have a sense of what the
vehicle is experiencing without it having to be in the user’s line of sight. By attaching sensors to the
vehicle and communicating that information back to the controller, the controller can tell the user what the
vehicle is experiencing. For example, if it is approaching an object. This is done by using a distance sensor
attached to the vehicle. A push back on the user’s thumbs will accurately make the user feel what the
vehicle is experiencing. The communication to and from the vehicle to the controller is done by radio. This
allows for a larger range than other methods would give. The finished project will have uses in a variety
of industries, such as commercial, medical, or military fields. Specific applications include tree cutting
drones, mobile robots in power plants, and surgical machinery.