| Purpose: |
"Design and operate an autonomous lawnmower
using the art and science of navigation
to rapidly and accurately mow a field of grass." |
|
Sponsor Needs:
|
1. Create an autonomous lawn mower to enter into
the competition
2. Make it safe
3. Make it work according to the specifications and incorporate (GPS)
4. Compete in the competition
5. Make aesthetically appealing
6. Win the competition
|
| Protypes: |
Trekker Robot
Program Development & Sensor Testing
|
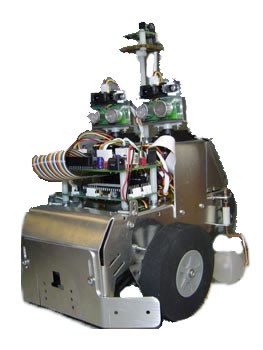
AUTOMOW 2K5!
Final Product
|
|
|
|
|
Concept Generation
|
|
 |
 |
|
Concept 1
|
Concept 2
|
|
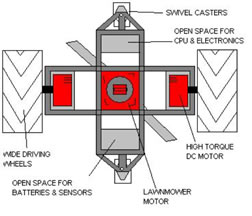
The initial design, shown as Concept 1, for the
robotic platform was to have a small frame with all the navigation equipment
on top and have a blade enclosed underneath. A secondary design, Concept
2, would have the equipment enclosed within the housing of the robot and
would pull a commercial lawn mower. For the final prototype, designs from
each concept were used. The final robot used independent steering, contained
all the equipment in an enclosed housing, and a small blade enclosed underneath.
|