Design Conception and Selection
Several ideas were generated during the design conceptualization. Shown below are the ideas that the group generated.
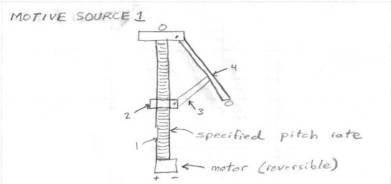
Show above is the Screw-type Tetrahedron over Tetrahedron design.
Proposed Operations: This design called for the center shaft to rotate via a DC motor. Link 2 would move up and down the lead screw, thereby deploying link 4 to the retracted or deployed position
Design Issues: This design was deemed impractical because of parts availability issues (center shaft lead-screw). Vibration damping would be very difficult, adaptation of a vibration damping mechanism would be nearly impossible
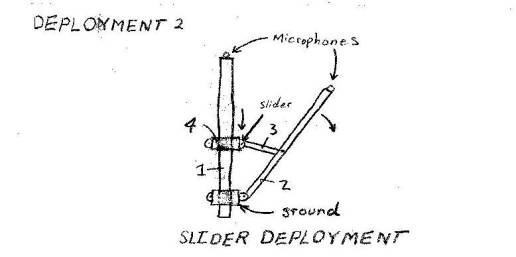
Shown above is a Four-Bar Slider Frame.
Proposed Operations: Slider would move via a linear actuation mechanism, causing it to move up and down thereby deploying or retracting link 2.
Design Issues: Linear actuation device was very difficult to implement into the design. This was overcome by simply utilizing the center shaft as a dual slider mechanism.
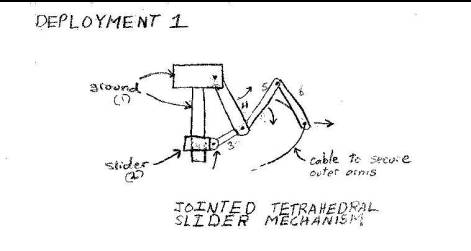
Shown above is the Jointed Tetrahedral Slider Mechanism Frame design.
Proposed Operations: A slider attached to a pulley cable mechanism caused deployment or retraction of link 6, due to movement of the foldable four-bar linkage.
Design Issues: Very difficult to implement cable actuation system, there are no connection points available on foldable four-bar linkage rods. Numerous connection joints allow for more points of vibration initiation caused by the array itself, causing more disturbance in the microphone sensors.
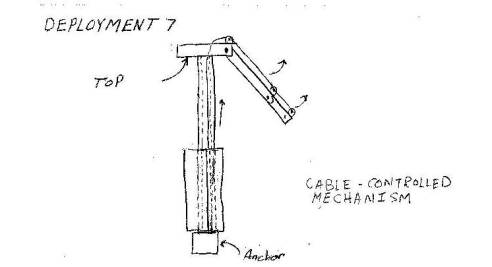
Shown above is a Cable Controlled Deployment Mechanism Frame.
Proposed Operations: External slider is linked to cable pulley system to retract and deploy array.
Design Issues: Again, this design is very impractical to implement, as the slider mechanism in the fully retracted position would interfere with the foldable four-bar linkages.
Final Design Decision Matrix
|
Mechanism |
Price to Produce (0.2) |
Weight (0.15) |
Rigidity (0.05) |
Complexity (# of
parts) (0.1) |
|
A |
4 |
4 |
8 |
5 |
|
B |
8 |
5 |
6 |
5 |
|
C |
7 |
2 |
6 |
5 |
|
D |
1 |
4 |
3 |
1 |
|
Adaptability (0.25) |
Machinability(0.05) |
Vibration Resistance
(0.15) |
Overall Height (0.05) |
Total |
|
4 |
4 |
2 |
10 |
0.481 |
|
8 |
7 |
5 |
10 |
0.9 |
|
3 |
5 |
2 |
10 |
0.3875 |
|
2 |
8 |
3 |
10 |
0.406 |
|
Key |
|
|
A |
Tetrahedron over
tetrahedron screw-type |
|
B |
Four-Bar Slider
Linkage folding down |
|
C |
Jointed Tetrahedral
Slider |
|
D |
Cable Controlled
Deployment |
|
Ratings |
1 |
5 |
10 |
|
Price |
Expensive ($175+) |
Mid-Range ($140+) |
Cheap (>$100) |
|
Weight |
Heavy (+10 lbs) |
Moderate (+5 lbs) |
Light (>5 lbs) |
|
Rigidity |
Soft (Very Flexible) |
Firm (Moderate
Deflection) |
Rigid (No Deflection) |
|
Complexity |
17+ Parts |
15-17 Parts |
>15 Parts |
|
Adaptability |
Complex |
Moderate |
Simple Mounting |
|
Machinability |
Complex |
Mid-Range |
Simple |
|
Vibration Resistance |
Poor |
Moderate |
Outstanding |
|
Overall Height |
<25% Taller than
Robot |
Up to 25% Taller |
Up to 10% taller |
After examining the results of this decision matrix, the most practical design was clearly design B, the Four-Bar Slider Linkage folding down.