Our system is powered using four 12 volts batteries connected in series. These batteries are connected to three motor controllers that controls the pitch, turning, and in/out movement of the traction kite. The largest motor is used for the deployment and retraction of the kite, while the other two less powerful motor control the turning and the pitch. Motors are represented in red in the following ProE assembly:
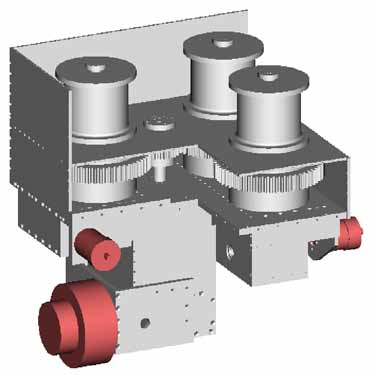
Figure 6: Representation of motors
Below are pictures of the various electronics components.

| Motor Controller | RC Receiver | RC Interface | RC Transmitter |
The RC interface connects to the RC receiver and motor controller. The batteries and motors are also connected to the motor controller. The signal is sent by the transmitter and translated by the receiver. The motor controller then receives this signal and causes the motors to rotate in the commanded direction. Three motors are used to allow the pitch, turning, and in/out motion to move independently. The RC transmitter sends signals coded on different channels. Each channel corresponds to one of the controllers. The frequency of the signal controls the speed at which the lines are released and captured.
Figure 8 depicts the electronics connected to the system. The three
motor controllers sit on a plate attached to the bottom of the frame.
Multiple cables connect the batteries to the controllers, and each motor
is connected to its respective controller.

Figure 7: Electronics