Welcome to the Lunabot Website
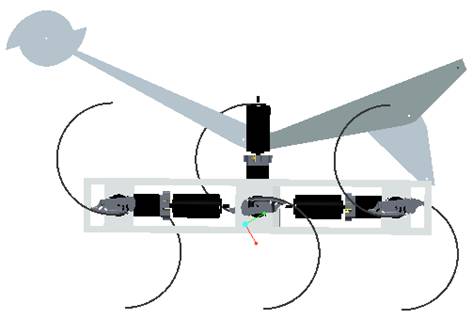
This senior design project’s purpose is to be entered into the Third Annual NASA Lunabotics Competition. This competition goal is to create a robot capable of operating in a lunar environment, including traversing rough terrain, and collecting lunar soil. After the soil is collected, it will be deposited into the LunaBin. This LunaBin will be located 0.35m from the top of the lunar surface. Research on regolith would help determine the feasibility of lunar inhabitance, which could lead to future scientific breakthroughs. The competition will simulate the lunar environment and the accompanying hazards found on the moon, including craters and obstacles for the robot to traverse. Previous competition teams have succeeded with more traditional wheel based design, but have struggled with navigating the obstacles. This year’s team will complete with a hexapedal robot based on the RHex family of robots. The main benefit of this design is the ability to easily overcome various obstacles such as rocks and craters via C-shaped legs. A CAD model of our design is shown below.
Deliverable #3 - Code of Conduct
Deliverable #4 - Needs Assessment and Project Scope
Deliverable #5 - Product Specification and Project Plan
Deliverable #6 - Concept Generation
Presentation #1 - Concept Generation
Presentation #2 - Interim Design
Presentation #3 - Final Design
Deliverable #8 - Restated Project Scope and Project Plan
Presentation #4 - Progress Report
Presentation #5 - Progress Report
Deliverable #10 - Operations Manual
Presentation #6 - Final Design