


Abstract
Beyond Mars, there is a metallic asteroid named (16) Psyche. Scientists hypothesize that Psyche could be composed of planetary core material. After years of research, NASA's Psyche team will launch a mission in 2022 to send a satellite into Psyche's orbit to study the asteroid. The sensors on the orbiter will discover Psyche's age, topography and composition. After studying Psyche, there may be teams that wish to propose a follow-up mission that would send a surface explorer to the asteroid. Our team's mission is to design a device to collect samples to return to Earth for study. We are developing a robotic arm and gripper to transport Psyche surface samples to the FAMU-FSU College of Engineering Team 502's storage device. Like a human arm, our robot has three joints: a shoulder, an elbow, and a wrist. These joints move the arm around its environment. Two additional joints rotate the arm's base and gripper. The gripper joint aligns the fingers to the sample, and the base joint rotates the arm. The gripper uses its fingers to handle samples. We are building each joint with electric motors and sensors that read its position and speed to track the movement of the arm. Another sensor in the gripper detects when a sample is within range of the robot's fingers. This device triggers the fingers to close and hold the sample. The sample is then moved into the storage device. A signal from the storage device will indicate where each sample should be stored. Advanced programming, testing and collaboration with Team 502 went into this project's development to ensure seamless operation. The robotic arm will be designed with space-grade materials in mind. However, using space-grade materials to form our arm would be expensive. We are building the arm with custom plastic 3D-printed parts to save on cost. This design aims to be an effective solution for transporting and storing surface samples from Psyche.
Design
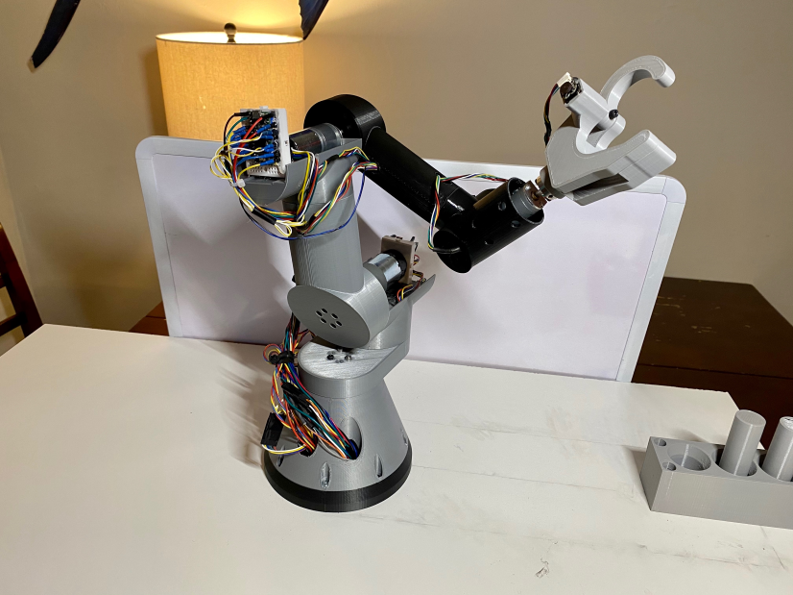
End-Effector
Finger is directly driven by motor to eliminate power transmission complications.
Versatility
Stationary finger acts as a guide to account for potential imprecision when locating the sample.
Controls
All motors controlled using PD Controls (Proportional and Derivative).
Precision
Each joint is precise within ± 0.2° of the target position.