In 2017, NASA introduced the Artemis missions with a goal of building a base on the moon. The team at Langley Research Center created a crane that will land on the moon attached to their Peregrine lander and unload the cargo. After unloading, the crane lowers onto a rover. The rover and crane combination will set up the lunar base before astronauts arrive.
Team 517 designed a machine that lowers this crane from the moon lander to the rover. NASA uses popular acronyms when naming projects, so our design is called the ARROW (Automated and Ranged Relocation Of the crane for Wider application). The idea comes from Artemis’ role in Greek mythology as the goddess of the hunt. Her symbols are the bow and arrow.
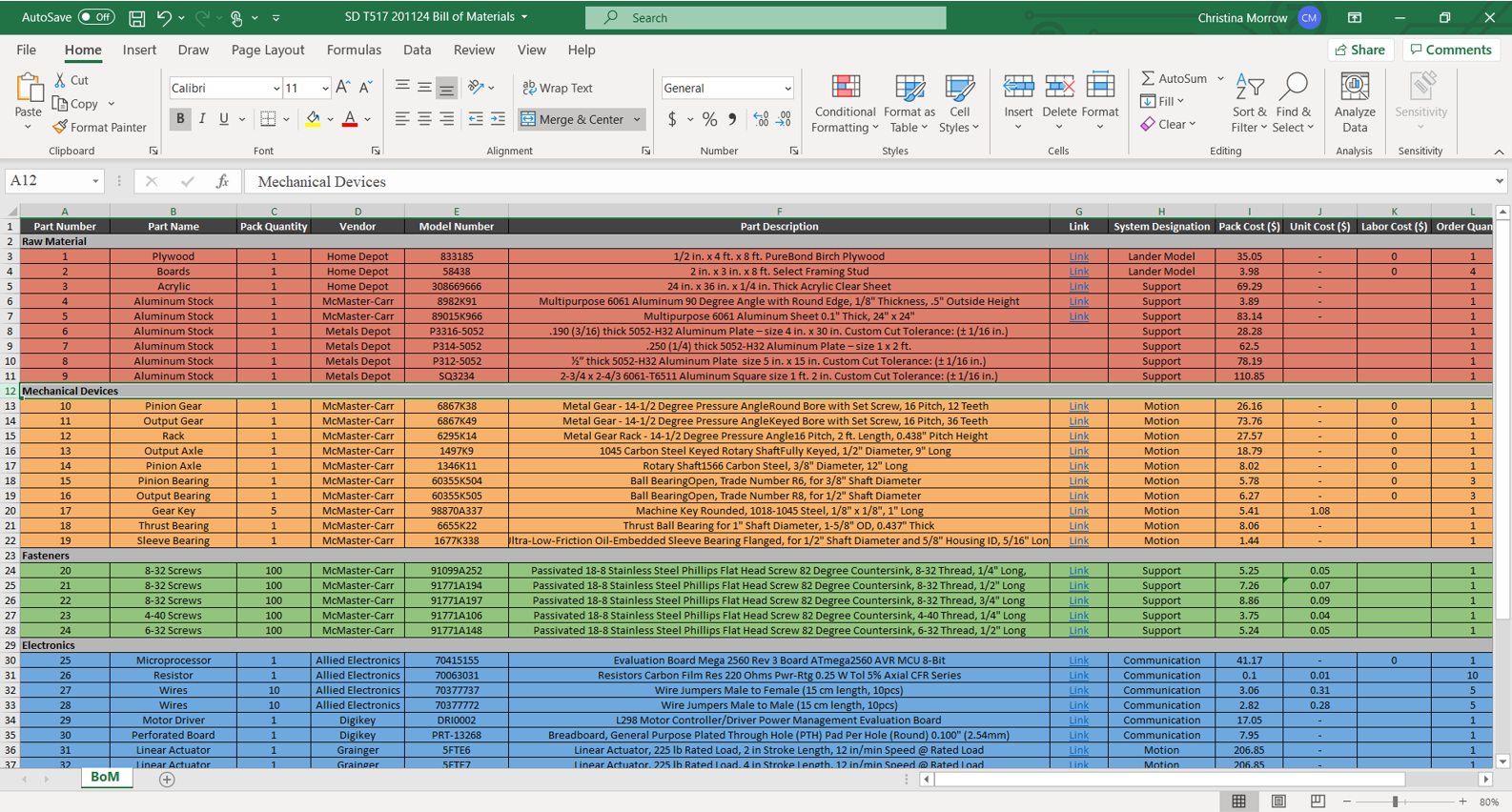
The design considers several constraints given to our team. This includes a weight limit, doing tasks free from outside control, and scaling for different crane sizes. The constraints allow the team to create a working design in the time given. Our team was successful in meeting these goals by keeping the weight below 20 pounds, making the ARROW scalable for any size, and enabling to the ARROW to work by itself. Our calculations were based on the mini crane.
Our ARROW supports the crane and rotates it off the Peregrine lander to position it onto the rover. The base of the ARROW uses a motor and gears to rotate the crane 90 degrees. The top half uses another motor pinned to a plate. The plate mates with the crane and angles it down towards the ground. The crane uses supplied power from the plate to lower itself to the rover. The ARROW can scale for different crane sizes, meaning our design’s use extends to multiple missions.


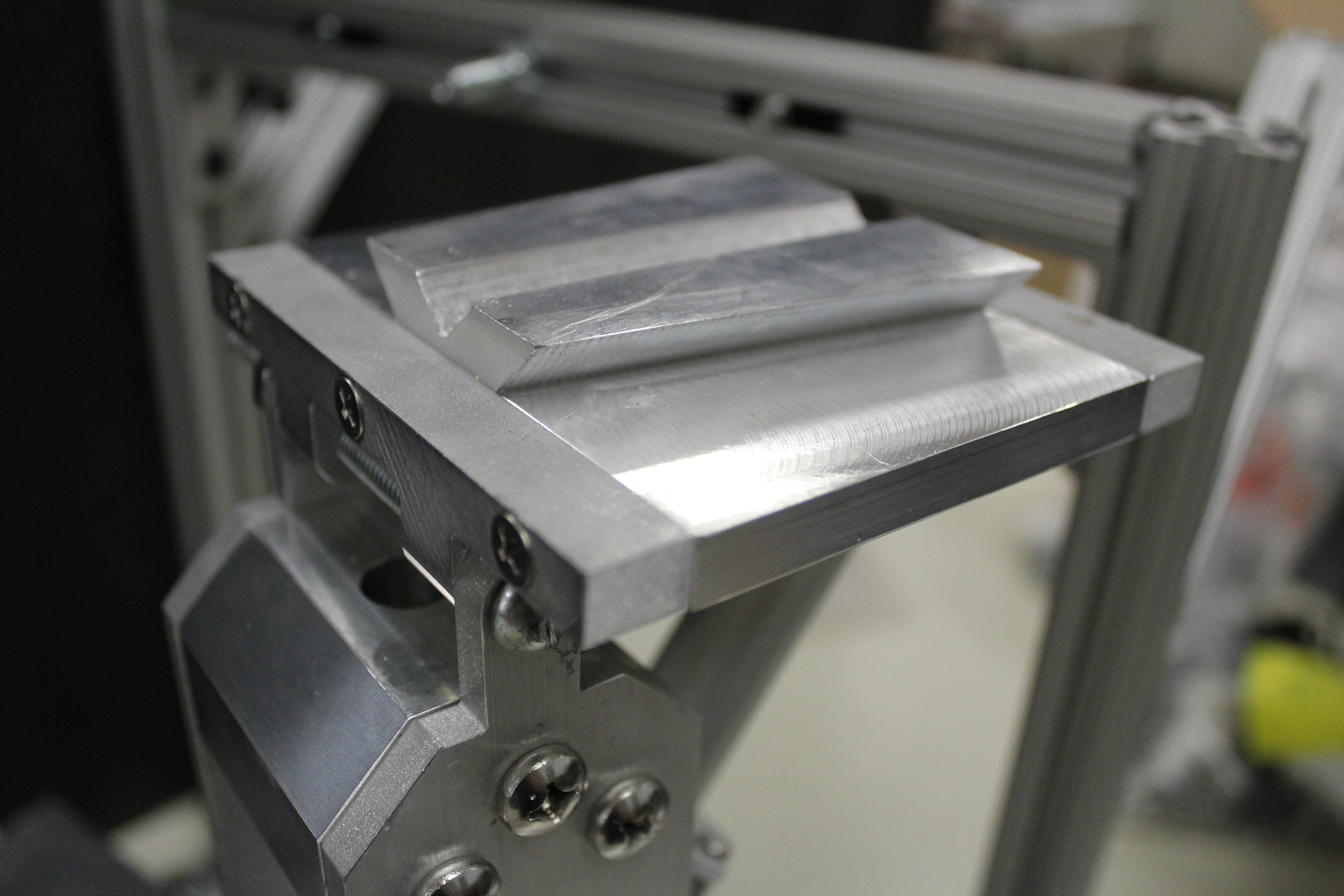
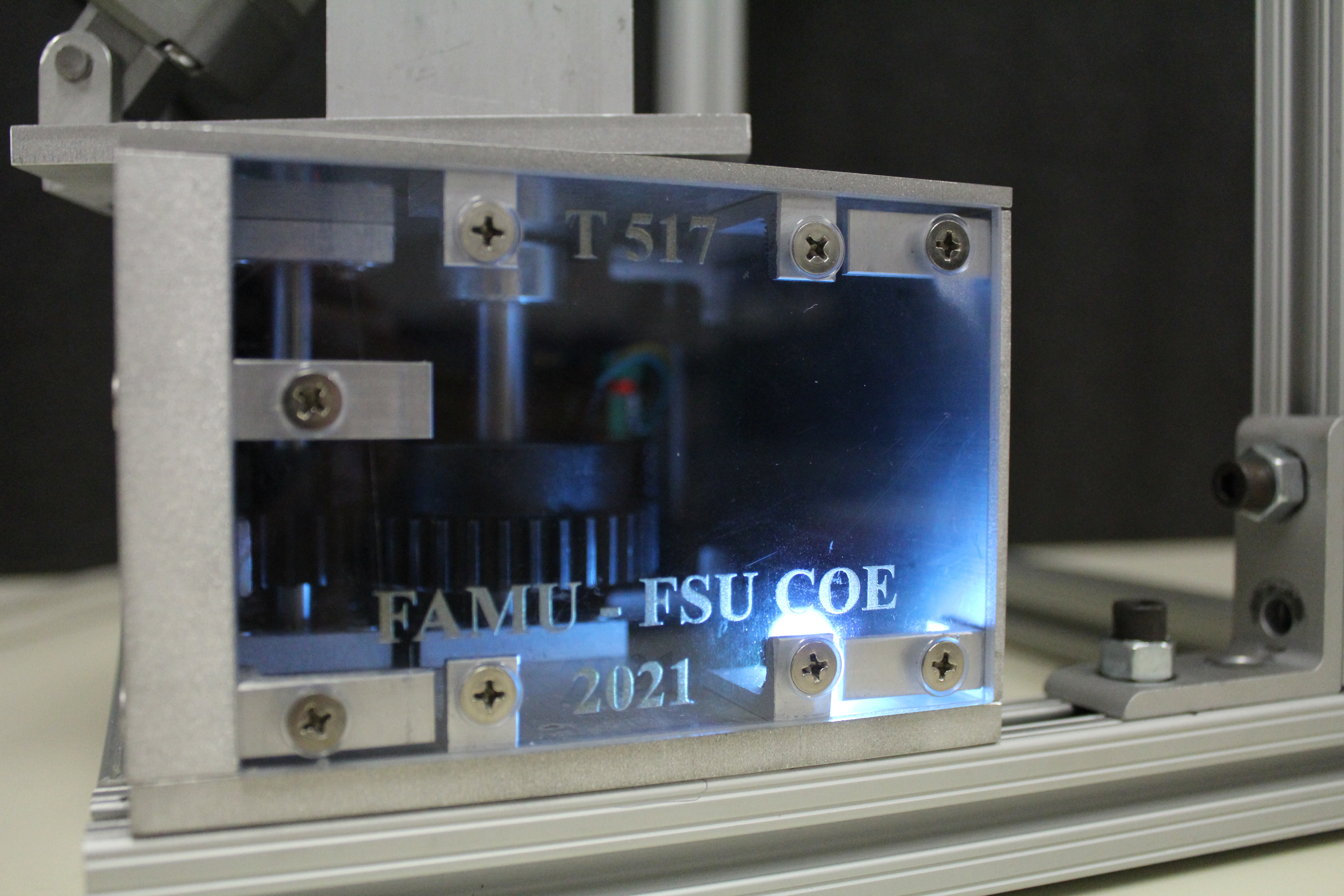
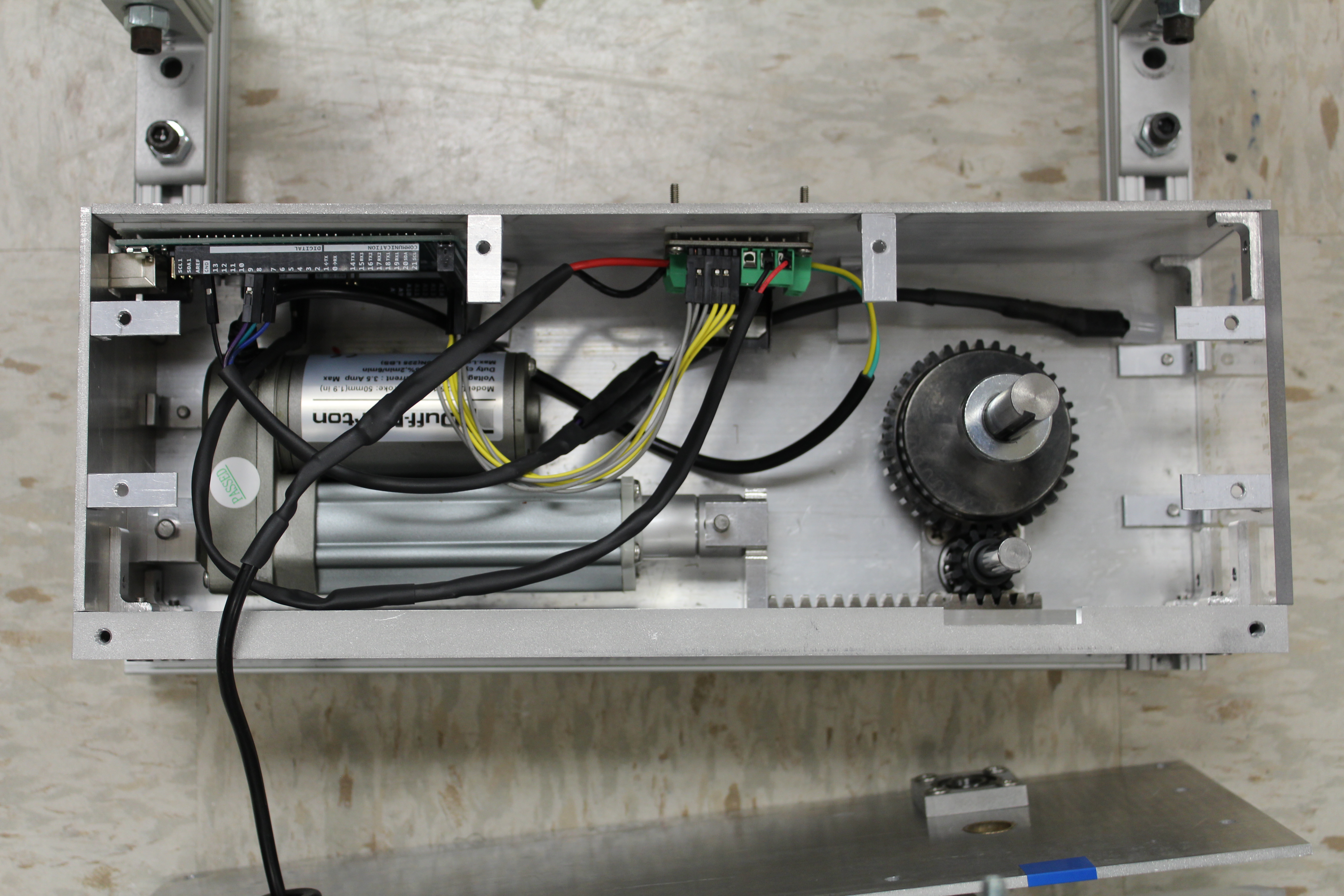

The ARROW (Automated and Ranged Relocation Of the LSMS for Wider application) is divided into two primary modules. The lower module houses a linear actuator coupled with a rack and pinion, which initiates 90 degrees of rotation about the vertical axis. The upper module is composed of another linear actuator coupled with a dovetailed connector plate. This module acts as a connection point for the LSMS and is responsible for lowering the LSMS 44 degrees down onto a rover. For a more in depth overview, visit the Manuals subsection of the Deliverables.

Alanna will graduate with a bachelor's in Mechanical Engineering from FAMU-FSU College of Engineering in the Fall of 2021. She then plans to work towards her master's in Mechanical Engineering and then finally, her Ph.D. in robotics. She is interested in the design of robots and machines that are used to help humans in the pursuit of space exploration.
visit my Linkedin
Jayson graduated with a bachelor's degree in Mechanical Engineering from the FAMU-FSU College of Engineering and plans on attending graduate school in the Fall of 2021 to receive a master's degree that combines the aerospace and the automotive engineering field. He dreams of creating a lunar vehicle that functions similar to your car on Earth.
visit my Linkedin
Christina graduated with a bachelor's in Mechanical Engineering from the FAMU-FSU College of Engineering in the Spring of 2021. She plans to receive her master's in Mechanical Engineering in the Summer of 2022. She is interested in the design and testing of outdoors gear used for backpacking and rock climbing.
visit my Linkedin
Ryker graduated with a bachelor's in Mechanical Engineering from the FAMU-FSU College of Engineering in the Spring of 2021. He is interested in material science as it applies to space travel. He is looking to break into the space industry and join the team of engineers pushing us forward into space.
visit my Linkedin
Project Supervisor

Point of Contact

Senior Design Coordinator

Academic Advisor