Abstract
Transformers use fault current indicators to detect faulty current. Since the fault current indicators are internal, FPL technicians must check every transformer in a particular area to find the location of the fault. To prevent this, team 304 is developing a method to find faulted pad-mounted transformers using computer vision. This goal is inspired by Florida Power and Light’s existing drone system, currently in use to locate and film different types of power equipment.
The team’s first task is to create a way to show a faulted transformer using a beacon that mounts to the transformer’s surface. The beacon is attached to a pre-existing internal fault indicator, which supplies power to the beacon when a fault happens. Once the beacon receives power, a spring will release the beacon to an upright position. Then, an LED at the top of the beacon will turn on. This change in shape and light is seen by FPL cameras, sending the images to the second part of the design.
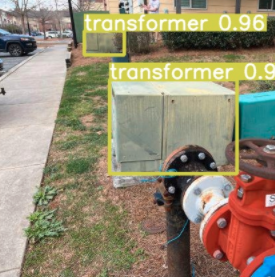
The second part is a computer vision system that can detect the transformers, LED lights, and the levers position. Training this model involves collecting a library of transformer and beacon images. The library uses different angles, environments, and states to increase the model’s ability to make correct detections in as many circumstances as possible. The image library is then sorted and labeled before it is used to train a data object detection model. The name of the algorithm “You Only Look Once”, or YOLO, is chosen due to its ability to make accurate detections on real-time footage. Once the model has been trained, it will undergo a series of tests. This testing will compare changes in the training library with the goal of improving detections.
Future Work
As of 3/25/2022, the final stages of the project are now in motion. The team has just finished
presenting VDR5. The hardware beacon needs one or two more design tweaks and then the final design can be printed.
There are promising preliminary test results for the object detection model. The team will continue to make the model better by
implementing synthetic data, taking a variety of pictures, and testing in different conditions. Here is a list of deliverables
that the team needs to complete in order to finish the project:
Mechanical Engineers
- Make slight adjustments to beacon and print
- Attach components to model transformer
- Stress-test sprint functionality
- Create test video for machine learning model
Computer Engineers
- Take more dataset images
- Include synthetic data in dataset
- Test machine learning model with different parameters
- Gather drone footage
- Once model is finalized, test on drone footage




 Sam Hammermaster
Sam Hammermaster Erin Murphy
Erin Murphy Gage Irwin
Gage Irwin Jordan Wilkerson
Jordan Wilkerson Kent Logue
Kent Logue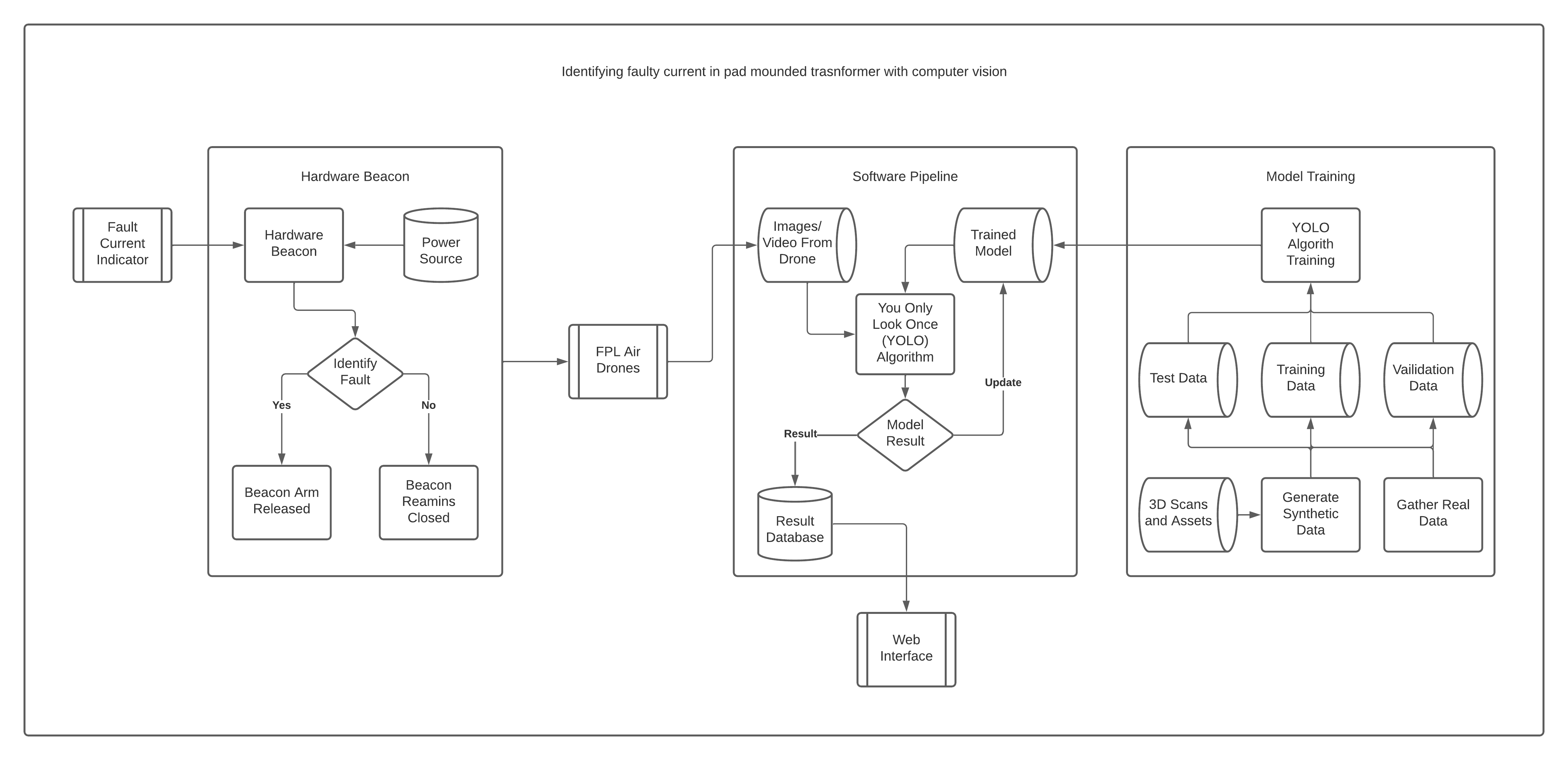



{kind=link}