

Meet the Team:

Dynamic System Engineer

Mechatronics Engineer

Design Engineer

Materials Engineer





The RE-RASSOR project is a mining rover designed for STEM education. The project is based on NASA’s RASSOR that mines soil on different planets and moons. They both feature two rotating drums hinged to the body with a shoulder joint and arm. The drums spin from opposite sides allowing the rover to collect samples. As space exploration expands, this movement is crucial to excavate in locations with low gravitational forces.
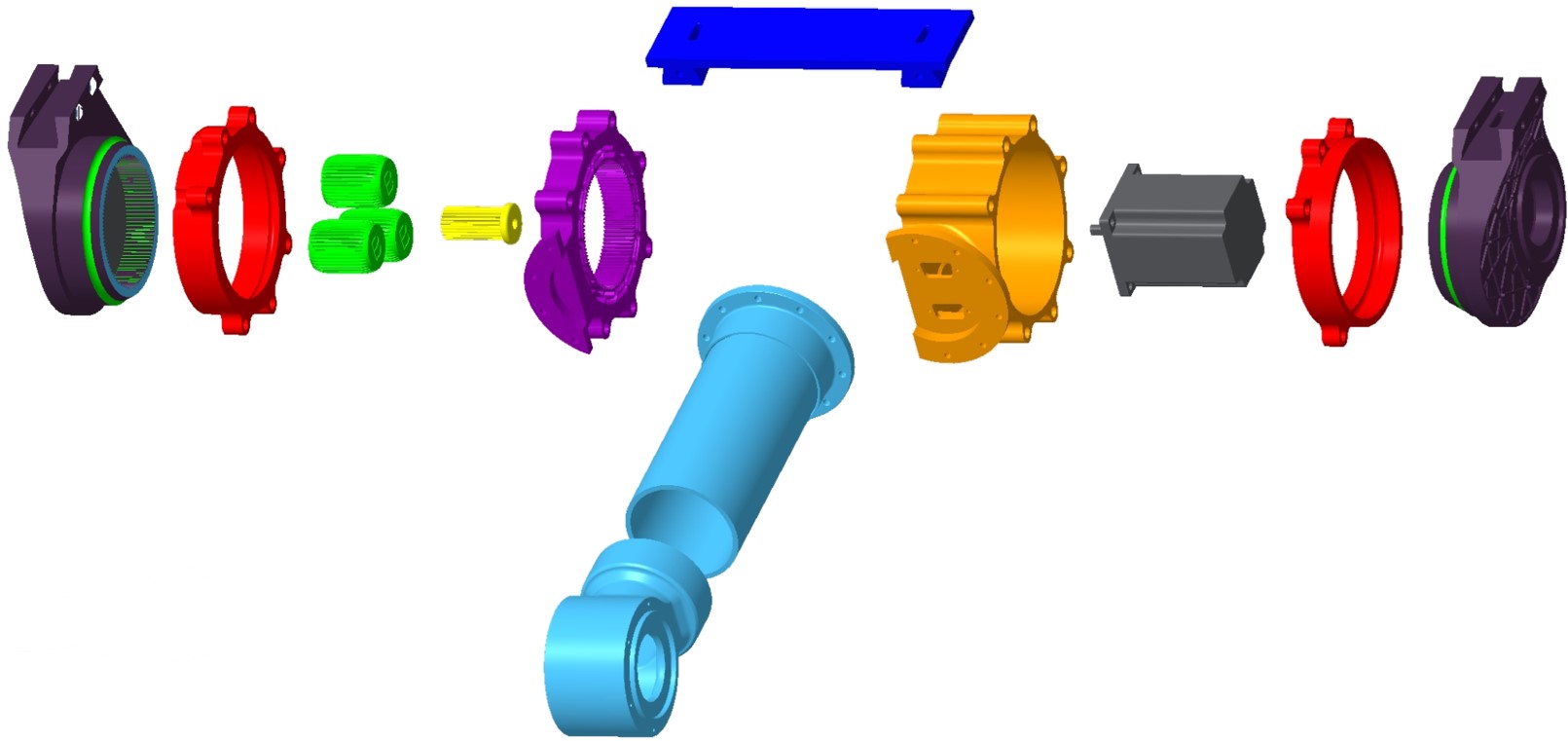
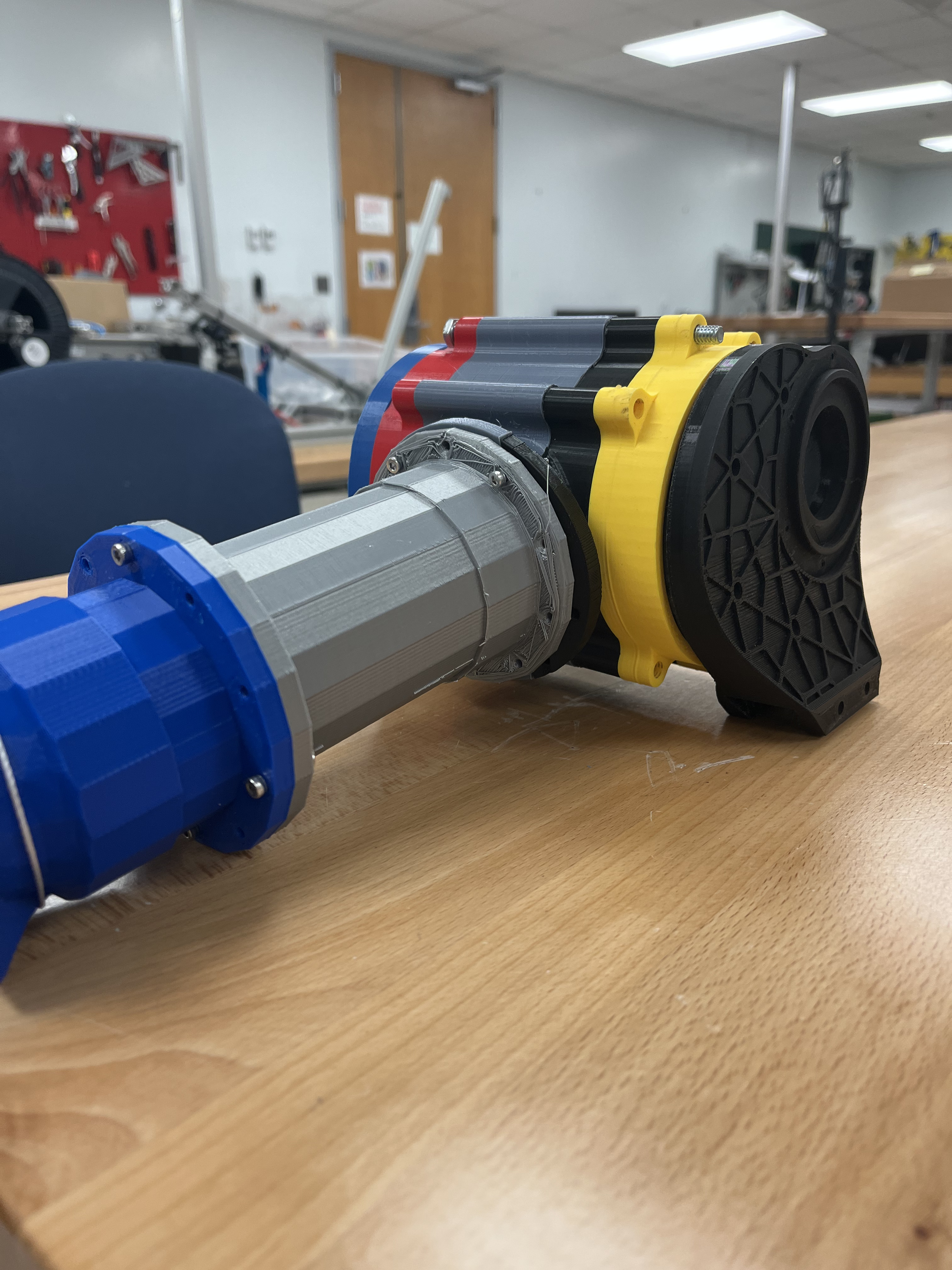
The Florida Space Institute and NASA have appointed a team from the FAMU-FSU College of Engineering to design the shoulder joint and arm. The shoulder joint is responsible for moving the arm to the desired position during mining, transporting heavy loads, and adjusting the drums to travel through tough terrain. The goal is a light, inexpensive, and durable design that is cohesive to the rest of the rover. The project includes the design and selection of housing, gear box, motor, bearings, materials, and arm.
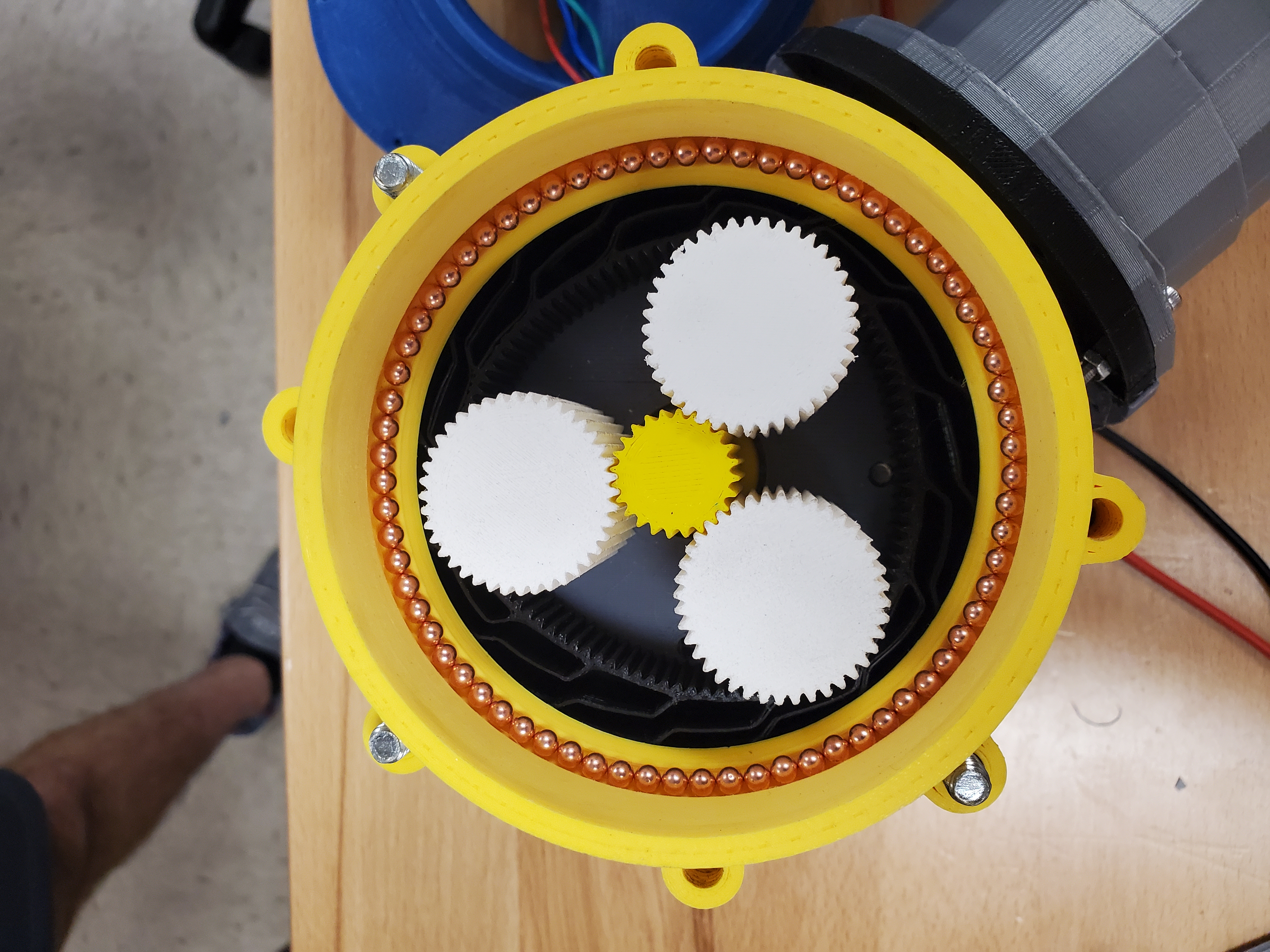
To make the rover affordable and accessible for schools, most parts need to be 3D printed. This ensures it is replicable and budget friendly (cost of supplies is $60). Since filament is fragile, the design will need to focus on the structural integrity of the housing, gearbox, and arm. The optimal weight of the design will allow it to be sturdy yet functional. Because filament is not optimal for bearings, bolts, and motors, they will be outsourced and selected based on their price and availability. The gearbox design needs to achieve the required torque from the motor to mobilize itself with added loads. The arm must withstand the loads and stressors that come with 270 degrees range of motion. A successful design will provide the necessary torque, range of motion, and support to perform its tasks with the given budget and power.
3.4 kg 4.54 kg