Sponsors and Academic Advisor
Sponsors and academic advisor leading the team to success

Michael Zanetti, Ph.D.
Sponsor from NASA-MSFC
Dr. Zanetti is the mentor appointed by NASA-MSFC to help with the project. We have biweekly meetings to ensure the group is on the right track. The meetings consist of useful information that is taken into consideration with each step of the design process.

Arthur Werkeiser
Sponsor from NASA-MSFC
Arthur Werkeiser is a supporting mentor for the group from NASA-MSFC. Originally, only Dr. Zanetti was helping the group, but Arthur was more than willing to join in every meeting to add his knowledge into the conversation.

Jonathan Clark, Ph.D.
Academic Advisor
Dr. Clark is the academic advisor for this project. We have biweekly meetings that expand the group's intuition for tackling the problem at hand. His advising has led us down the right path and he has stood with us every step of the way.

Meet The Team
We are pioneering the next generation of movement on the Moon

Joshua Baldwin
Quality & Design Engineer
Joshua will graduate in Spring 2023 with a Bachelors of Science in Mechanical Engineering focusing on Dynamic Systems with a Minor in Physics from the FAMU-FSU College of Engineering. He plans to obtain a Professional Engineering license and become a Structures Engineer after graduation.



Andres Hernandez Chapa
Systems Engineer
Andres will graduate in Spring 2023 at FAMU-FSU College of Engineering with a Bachelors of Science in Mechanical Engineering and a focus of Thermal Fluids. After graduation, he will move to the Midwest to pursue his career as a System Performance Engineer in the automotive industry.

Objective
Our objective is to develop a novel movement system that can successfully traverse the lunar surface.
Abstract
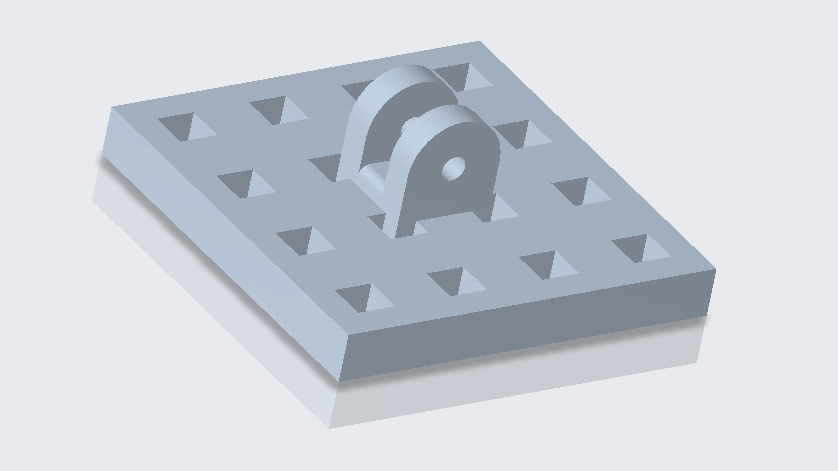
Wheeled rovers become unstable on the Moon because of the diverse terrain. The surface consists of regolith, a loose mixture of dust, gravel, and rocks with viscid effects. Regolith grains are small and sharp, which ruins equipment on the moon. The task is to see if a novel form of movement would be useful on the lunar surface. This project attaches a novel foot and ankle joint to Dr. Clark’s ET-Quad. The system is a four-legged robot meant to travel over different surfaces. The ankle joint design limits points of failure and mitigates regolith interference. Slipping occurs when wheeled rovers travel on inclined surfaces. The foot relieves this problem through extrusions on the bottom to increase grip. The designs include hooks, rails, and cleats. The foot models a snowshoe by using a grid to decrease pressure on the surface and reduce shifting regolith. To see how grids affect the surface, the team created a drop test with 3D printed parts on a tank. During the drop test, cameras view the surface impact to analyze the change in depth and the plumes of regolith created. To find which design lessens slip most, slopes of regolith will test to test the grip of each foot. For overall movement, the ankle joint will attach to a leg of the ET-Quad. Cameras will capture the movement while the leg hops in an elliptical track. This confirms endurance and future integration with the robot. The results from these tests will use three points to help select the best design. The final selected design will have grids that cause the least regolith disturbance. Combining the grid shapes with extrusions will supply the greatest resistance to slipping. Unification with ET-Quad will include the best ankle design.
Key Goals
Novel Form Of Movement
We are investigating unique ways of traversing the lunar surface through alternate forms of mobility.
Resistance to Regolith
Offering defense against regolith is imperative for applications to the lunar surface, and it is at the core of our design philosphy.
Lightweight
Payload weight is critical to space deployment. We use material selection to optimize weight while simultaneously keeping structural integrity.
Portfolio
Downloadable files showing the progress of our development
Future Work
Timeline of future product development
-

April 6
Senior Design Day
The team will showcase a presentation of the final product.
-
April 7-12th
Optimizing the Design
The team will enhance the design choices and will further optimize for the lunar surface. -

April 13-17th
Analyzing the Data
The team will analyze the boom testing data and will confirm the best design choices to follow. -

April 18-21st
Verification
The team will verify any additional testing and confirm the integration with ET-Quad.
-
Graduation!