Section A Review
Description of motion of a continuum (Section 3.1 to 3.4)
![]()
![]()
This is also called as path line as it traces a particle during its motion. (see example 3.4.2)
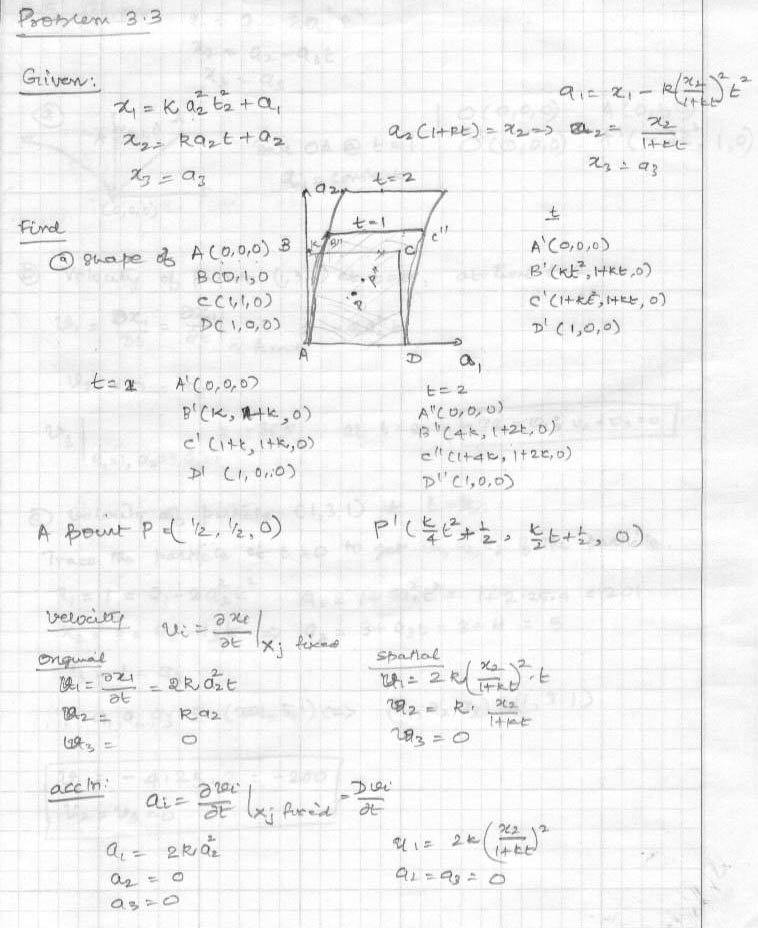
3. Example 3.1.1 explains how the motion can be used to graphically draw the deformed configuration from the undeformed and the equation of motion.
4. Total derivates are always taken with respect to the material coordinates, and hence in any problem try to convert to the above form as shown in example 3.1.2
5.
Velocity and acceleration components can be determined by taking time
derivative when
![]() is fixed. Thus
is fixed. Thus
6. See example 3.1.3 for example of 5.
7.
If any quantity (say temperature
![]() is specified in order to take the
derivate of this quantity use the total derivative as in,
is specified in order to take the
derivate of this quantity use the total derivative as in,
8. Acceleration is carried out exactly similar to that velocity, except you differentiate velocity instead of position vector.
See solution to problem 3.3 (see link)
{kind=link}