3. Kinematics of Deformation
Section B
Review to Section 3.5 to 3.11
![]()
Note
that
![]() is a rotation tensor and is
orthogonal,
is a rotation tensor and is
orthogonal,
![]() is the fixed point about which the
rotation takes place and
is the fixed point about which the
rotation takes place and
![]() is the translation vector of the
origin.
is the translation vector of the
origin.
3.
Infinitesimal deformation has very small strain and no rigid body motion.
For that purpose we need to define a quantity called displacement gradient given
by
 and an all important quantity deformation gradient
and an all important quantity deformation gradient
![]()

4.
Define infinitesimal strain
![]()
It can be shown that the above is affected by rigid body rotation and assumes that displacement gradient is small.
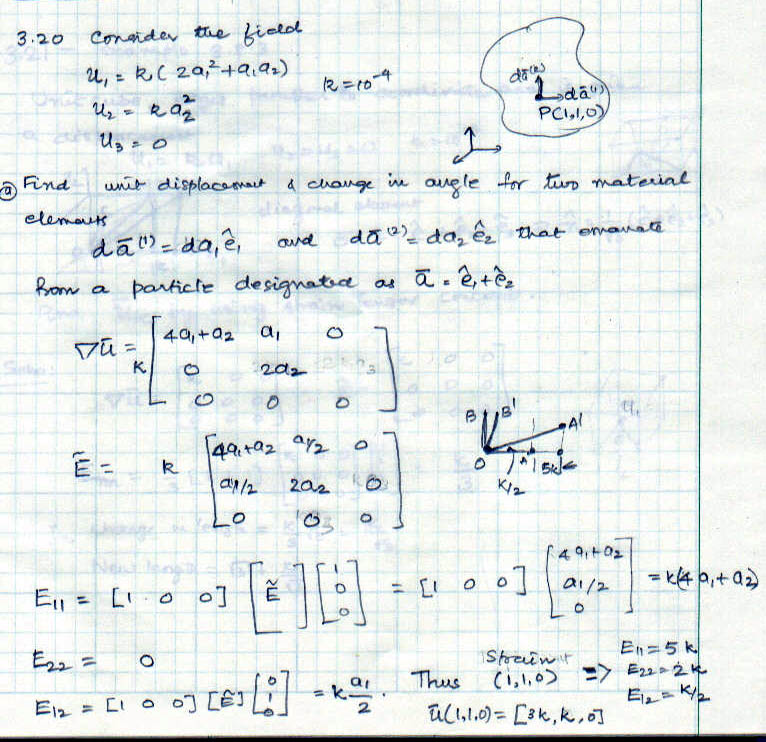
5. Given the displacement field, calculate displacement gradient and strain as shown in example 3.8.2.
6.
Physical meaning of the components of
![]() . The diagonal terms represents normal and off-diagonal terms shear between two
lines originally perpendicular in that coordinate system.
. The diagonal terms represents normal and off-diagonal terms shear between two
lines originally perpendicular in that coordinate system.
7. How do you compute the deformed geometry given the displacement field (see figure 3.5, page 103). Given a specific point in the deformed (or undeformed) system find the shape of the lines (examples 3.8.3)
8.
The strain tensor
![]() has three principal directions with
three scalar invariants.
has three principal directions with
three scalar invariants.
9. The first invariant provides volume change per original volume called as dilatation.
10.
The total displacement gradient can be decomposed into
![]()
{kind=link}