| Publications
Research
in the news
CV
|
Research Overview
My research to date has focused on the design and construction of a new
class of legged robots for operation on unstructured terrain.
This has been accomplished by bringing together novel manufacturing
techniques with locomotion insights gained from collaboration with
biologists.
Bipedal Dynamic Climbing
Recent biological findings indicate that a number of fast
climbing
animals (in particular the gecko and cockroach) climb in a
dynamically similar manner. Despite their different morphologies,
limb
number, and attachment mechanisms they both undulate laterally with
significant in pulling forces. These findings have prompted a
proposed template for dynamic vertical climbing.
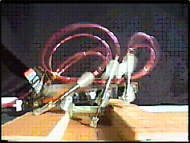
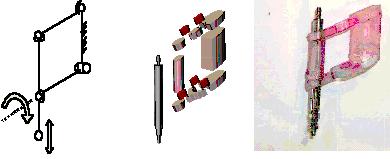
At the University of Pennsylvania, I designed and constructed
a dynamic vertical runner
based on this model of climbing. Initial results are
promising. We
have been able to achieve stable climbing gaits with force and motion
patterns characteristic of dynamic climbing animals.
Hexapedal Robot Design
The Sprawl family of robots developed at Stanford University has shown
that fast, cheap, stable, and
robust robots can be built that run over rough terrain with minimal
control effort. Emphasizing the role of the passive,
self-stabilizing dynamics in locomotion has allowed the construction
of robots that can easily clear hip-height obstacles.
Shape Deposition Manufacturing
The robots we have built derive their flexibility and robustness from
their construction using Shape Deposition Manufacturing (SDM), a
specialized form of rapid prototyping that not only allows the
construction of parts of arbitrary geometry, but also lets one use
multiple functional materials in the same part. This greatly
aids in the construction of compliant joints, since the material
properties of the joint as well as the geometry can be
controlled. In addition, components such as sensors, wiring,
bearings and motors can be directly embedded into the part as it is
being built.
Dynamic Modeling and
Simulation
In order to better understand Sprawlita’s dynamics, I have constructed
and empirically validated vSprawl, a fully-3D simulation of our
running platform. Using vSprawl, I have investigated the
trade-offs between stability and performance in terms of speed and
maneuverability. These investigations resulted in subtle
quantitative design changes to a version of the robot that more than
doubled its speed while preserving stability.

|