Initial Design
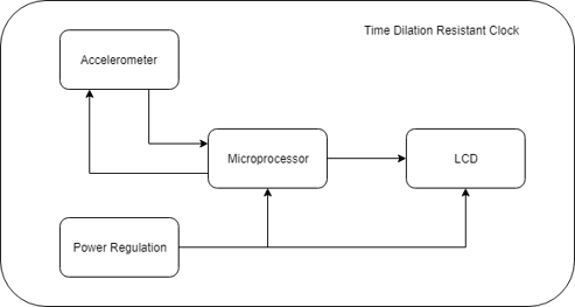
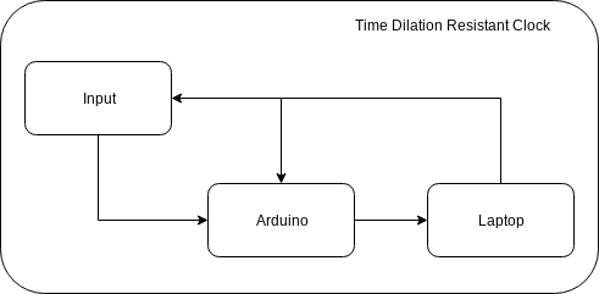
The team identified a few main needs for the project to function – measurement accuracy, easy integration, and a simple and modular design. To this end, the team chose to split the project into three main blocks: input, processing, and display. The input block was selected to be an accelerometer. The processing was to be done with a microprocessor with sufficient clock speed. Lastly, the adjusted time and proper time were to be displayed on an LCD. Power was supplied through a DC source (battery) and distributed to the microprocessor and display.
Functional Decomposition v1