|
|
|
Sub-Pages
|
Final Housing Design
The housing design was dependent on several parameters. The first was the size of the cave openings. The whole premise of the submersible robot project was to develop a robot which could be released into areas that cannot be reached by the divers from the Global Underwater Explorers. Therefore, the first parameter called for as small of a design as possible. The second parameter though was based on the dimensions of the sensors required to operate the submersible robot. So the robot could not be too small otherwise the required components could not be installed and the robot would not be able to perform its mission. Finally the robot had to be large enough to provide buoyancy to offset the mass of all the components inside the housing. In considering all parameters, the design the team created for the housing was built first around the dimensions of the internal components then around the requirement that it be as small as possible. Along with these parameters there were several other requirements that went into the design of the housing. The first was that the housing be able to stand up to the pressure at 300ft. The pressure increases one atmosphere approximately every 30ft so the housing would be under 10atm’s of pressure. The next requirement of the housing was directly related to the resurfacing system. The basis of the resurfacing system was that the photovoltaic cell would generate electricity from sunlight so the housing had to be clear to allow sunlight into the submersible robot. Another requirement was that part of the housing be filled with water so that the bladder could displace this water and remain protected from any foreign objects. The final requirement was that the internal components of the robot be accessible. This was because the robot’s buoyancy and resurfacing systems were both dependent on carbon dioxide for operation, so the canister would need to be removed when empty and replaced when refilled. There was also the requirement of the housing to be accessible because of the need to be able to access the sensors inside the robot which are used to store the data. Considering all of these factors the team chose to use a clear PVC pipe that was threaded on the ends. PVC was chosen because it is lightweight and durability. The transparent PVC was chosen to allow the light to enter the housing and the threaded design allowed for access to the internal components by using threaded end caps that could be removed. A section of the PVC pipe used is shown below.
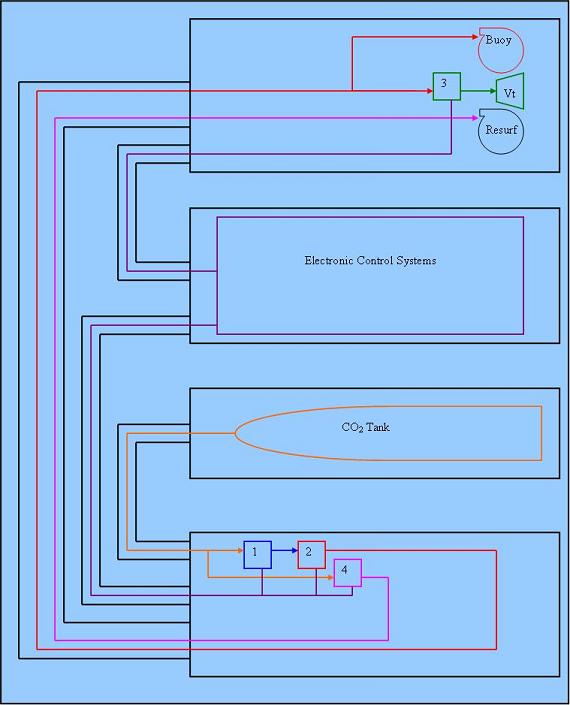
The next thing to consider was the size of the housing. The selection of the housing design was mass dependent so the team took and calculated the buoyancy of the submersible robot using the masses of some initial components. This led the team to a six inch diameter, six inch long housing. After researching availability of the parts the team decided to redesign the housing with a four inch diameter and a length of fifteen inches. The robot would use three of these housings and would get a buoyancy of 27.5lbs. Out of the three housings, the team used one of the housings as a wet/dry housing in which half of the housing was filled with water and the other half was filled with air. This housing was used to generate buoyancy as the water was displaced by the carbon dioxide filled bladder. The team used a PVC coupler and then cut a circular piece of PVC to fit the inner diameter of the coupler. This served as a divider between the wet and dry sections. The team then drilled three holes through the divider, through which the lines for the resurfacing bladder, the buoyancy bladder, and the vent line were run through. At each of these points PVC cement was applied to prevent any leaking. The team then developed a system by which the housings could be interconnected so that wiring and copper tubing could be run from housing to housing. The method had two requirements: one that no water can enter either housing and also that it is strong enough to protect the housing from any impact it may encounter. The team decided to drill holes into the end caps at one end and run the required wiring and tubing from one house to the other. Then plastic fittings were glued into the holes and plastic tubing was run from the fitting of housing A to the corresponding fitting of housing B. The second housing was used to hold three of the four solenoid valves and contained many of the copper fittings used to transport the carbon dioxide from the 12 oz canister to the bladders. It is in the second housing where the 12 oz supply canister is connected to the supply system through copper tubing and fittings. In using copper tubing and copper fittings the team is able to provide an airtight chamber in which to transport the carbon dioxide from one point to the next. The third housing was used for two reasons. The first reason the third housing was used was that the submersible robot was too heavy and required greater buoyancy. The second reason for the third housing was that the team needed somewhere to store the electronic components. The third housing was kept dry and was connected to the other two housings only to allow the wiring from the solenoid valves to be connected to the microcontroller. It was here in the third housing that the brains of the submersible robot are stored. The microcontroller, power supply source (lithium coin cell batteries), and photovoltaic are enclosed in this housing along with all the required wiring to connect them. It is also in this housing were a sensor package could be safely installed that could be used to make all the required measurements while the robot was underwater. Below is a diagram of how all the system were distributed and connected using the housing system.
The boxes labeled 1-4 represent the solenoid valves. The object label Buoy, Vt, and Resurf are the buoyancy bladder, one-way valve, and resurfacing bladder respectively. |
|
|