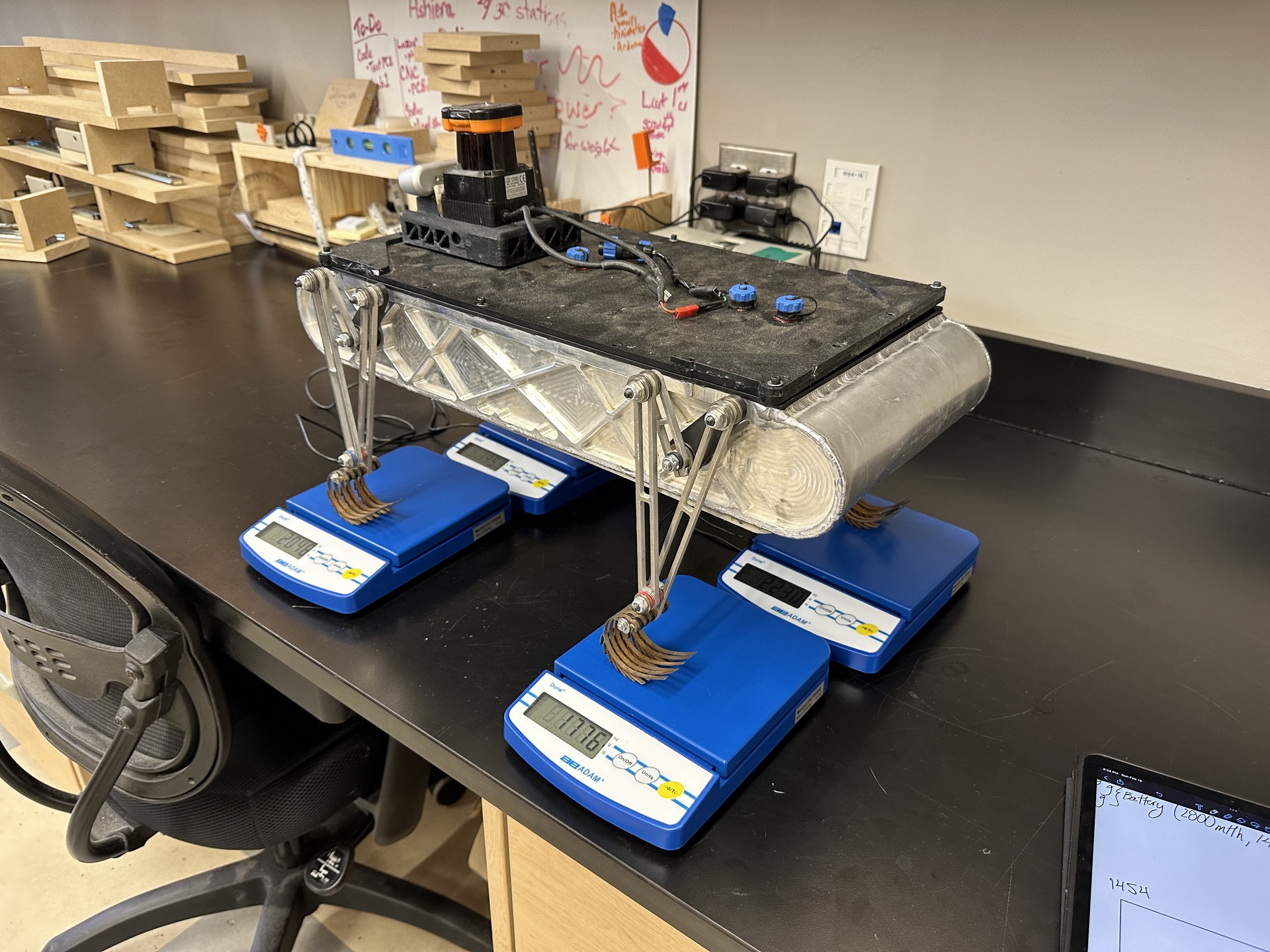
FAMU – FSU’s robotics group aims to efficiently
develop state-of-the-art
legged robots. Previous robots have required
costly, months-long development
cycles. Getting all the parts together and doing initial
testing has ended up
taking multiple weeks. This led to
issues arising from robot mass, motor sizing, and battery capacity.
These
issues have slowed down the design of each robot and CISCOR’s
progress.
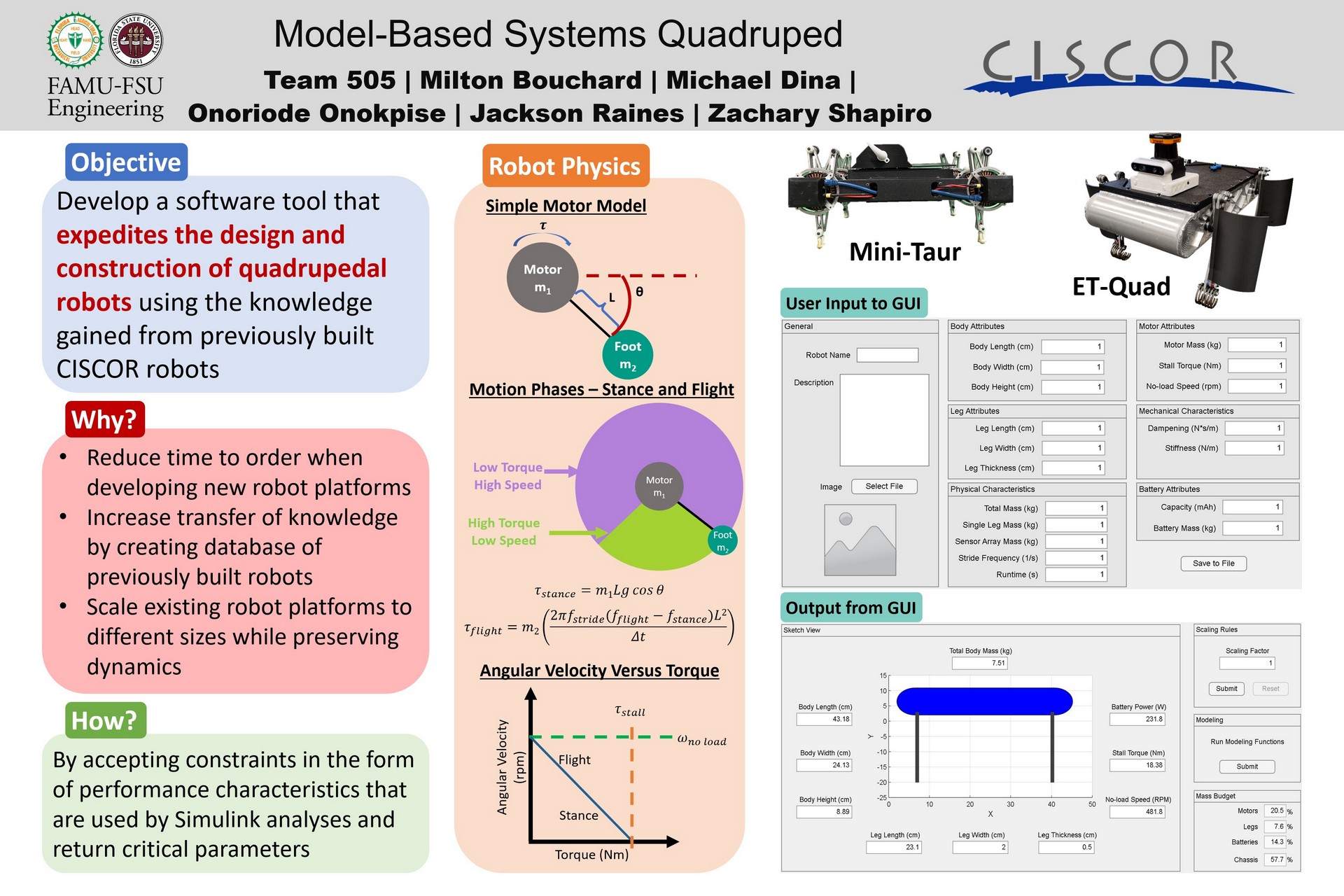
We use a
Model-Based Systems
Engineering approach to expedite
the design of four-legged robots. CISCOR
focuses on four-legged
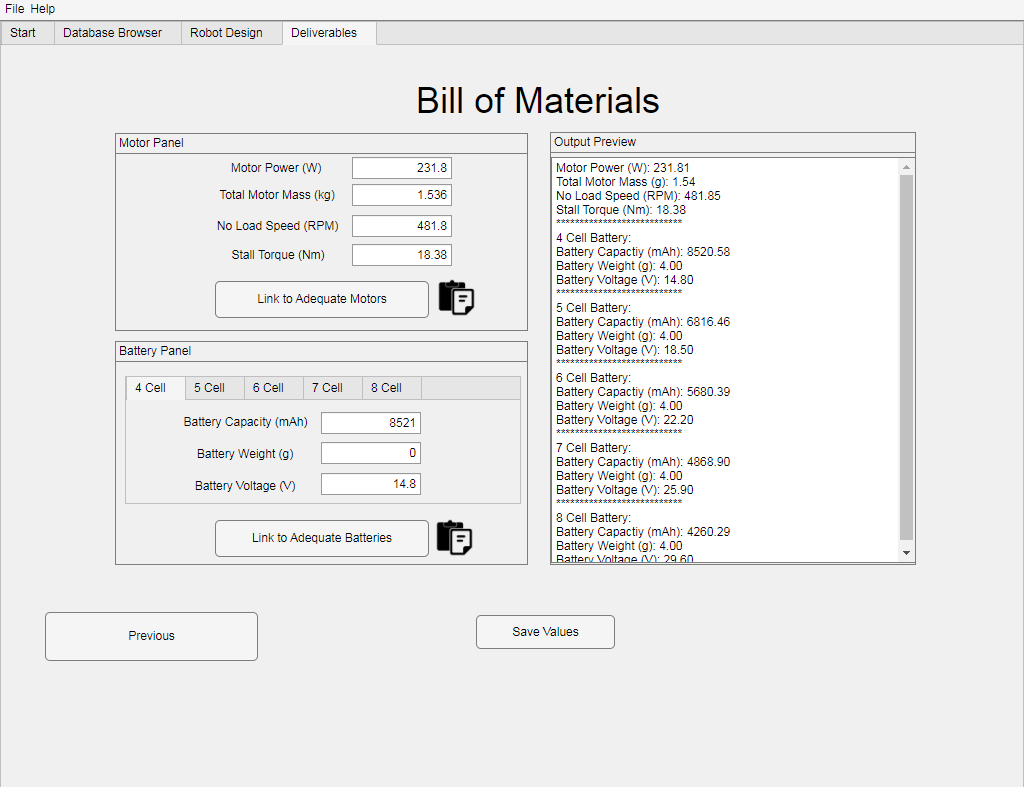
robots that run, climb, and swim, so we designed a tool that can
return critical parameters.
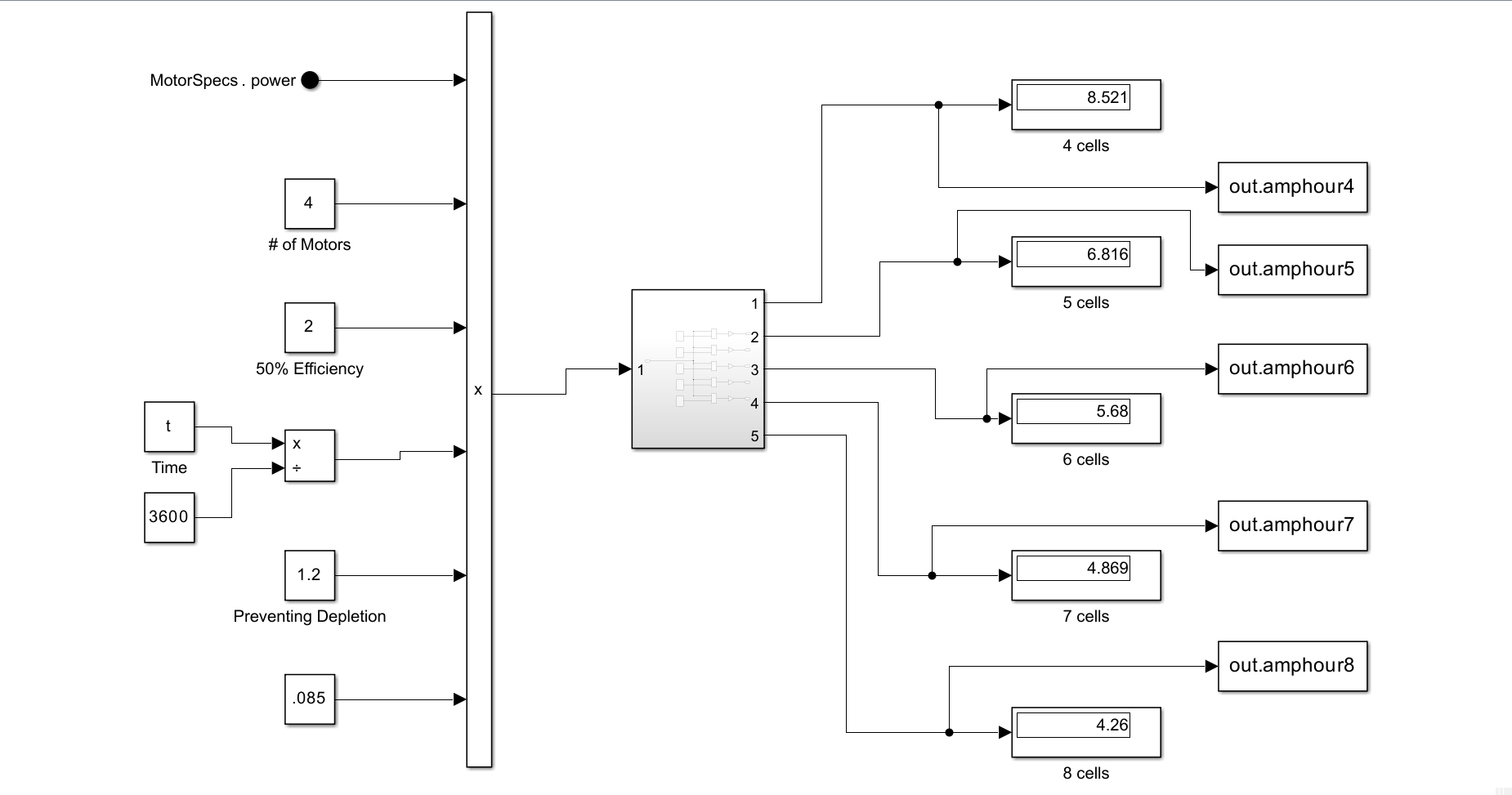
These parameters
include the mass distribution of the robot, the motor
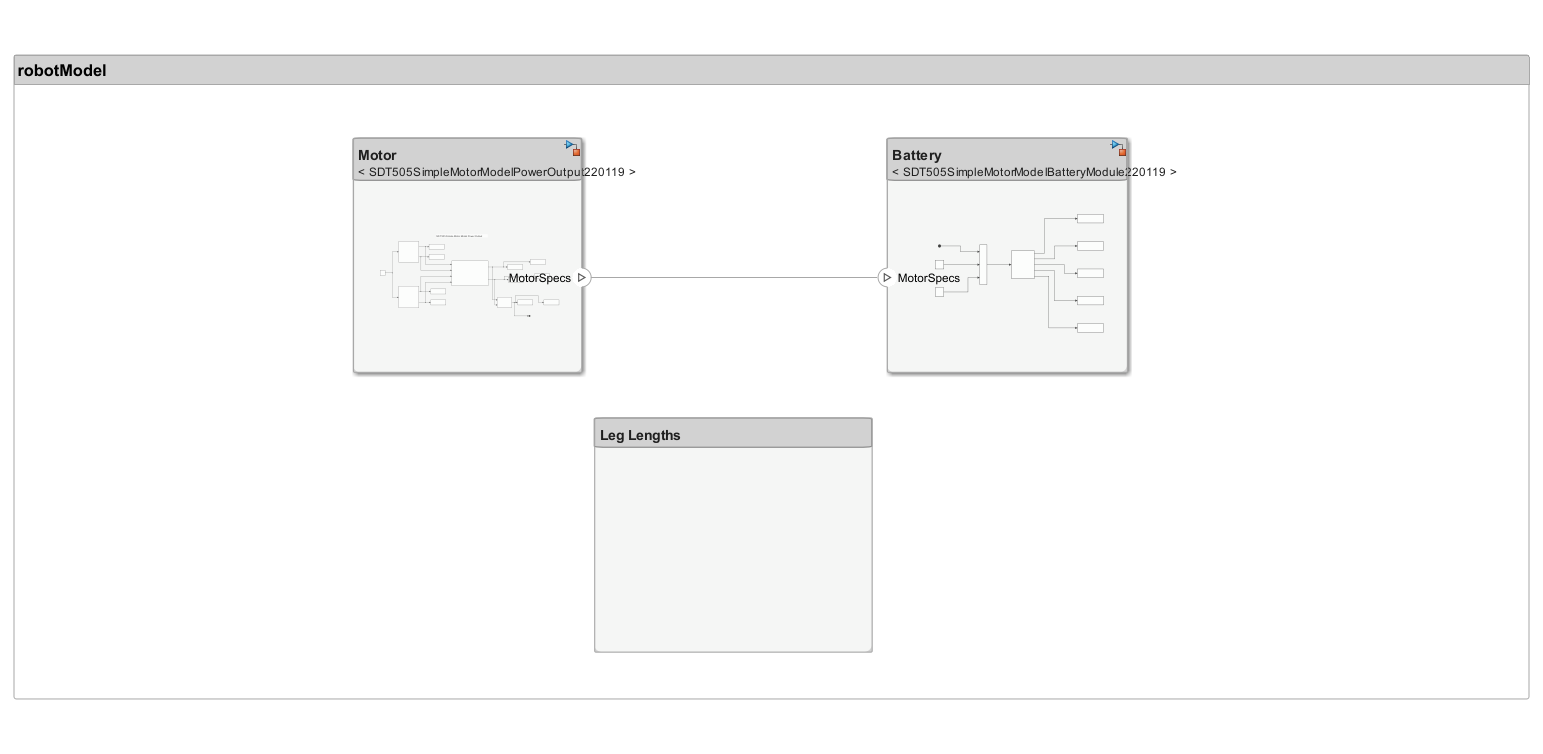
specifications, and other values. We use a combination of MathWorks
products, including MATLAB,
Simulink,
and System
Composer. These tools work together to accept performance
specifications and return the previously mentioned critical
parameters.
For
example, the user might want to build a robot that can climb at a
certain speed for a specific amount
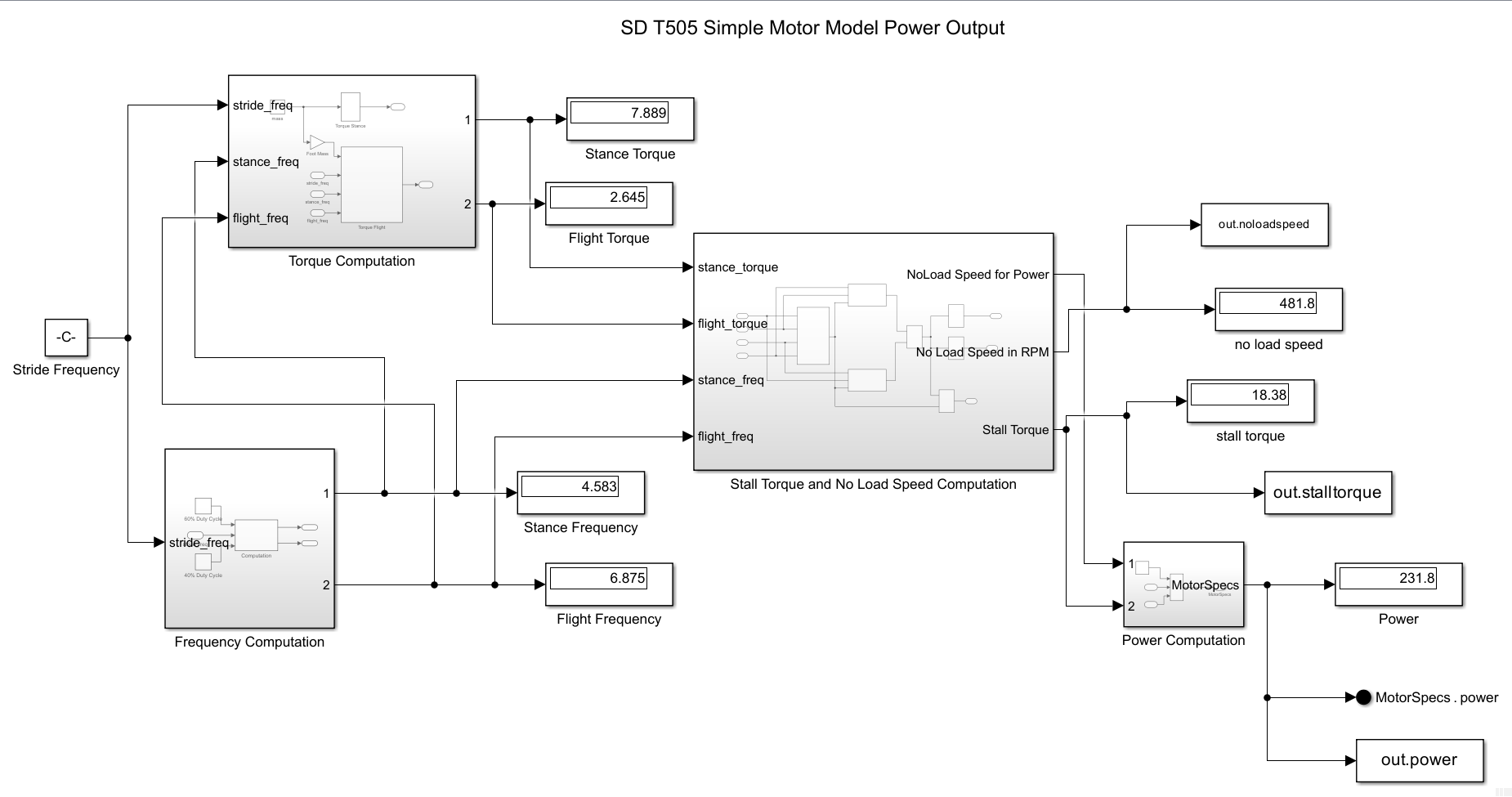
of time. Our tool accepts these values and outputs
critical targets like the stall torque and no-load speed.
We chose
these software packages because they have the capability
to
apply requirements.
Using the previous example, our tool can run its
analysis and see if the outputs
produce a robot that meet the user’s needs. The user can also
input
the data collected from previous robots to update and improve our
models.
As
more robots are built
using our tool, their data can also be added.
The goal is to reduce
the uncertainty
in design and time required
to build and test the robot. The
tool allows the user to be more confident in their design in a
shorter time.

Sponsor

Advisor

Sponsor
created with
Website Builder Software .