
 Team 503:
Formula 1/10th Vehicle
Department of Mechanical Engineering
Team 503:
Formula 1/10th Vehicle
Department of Mechanical Engineering
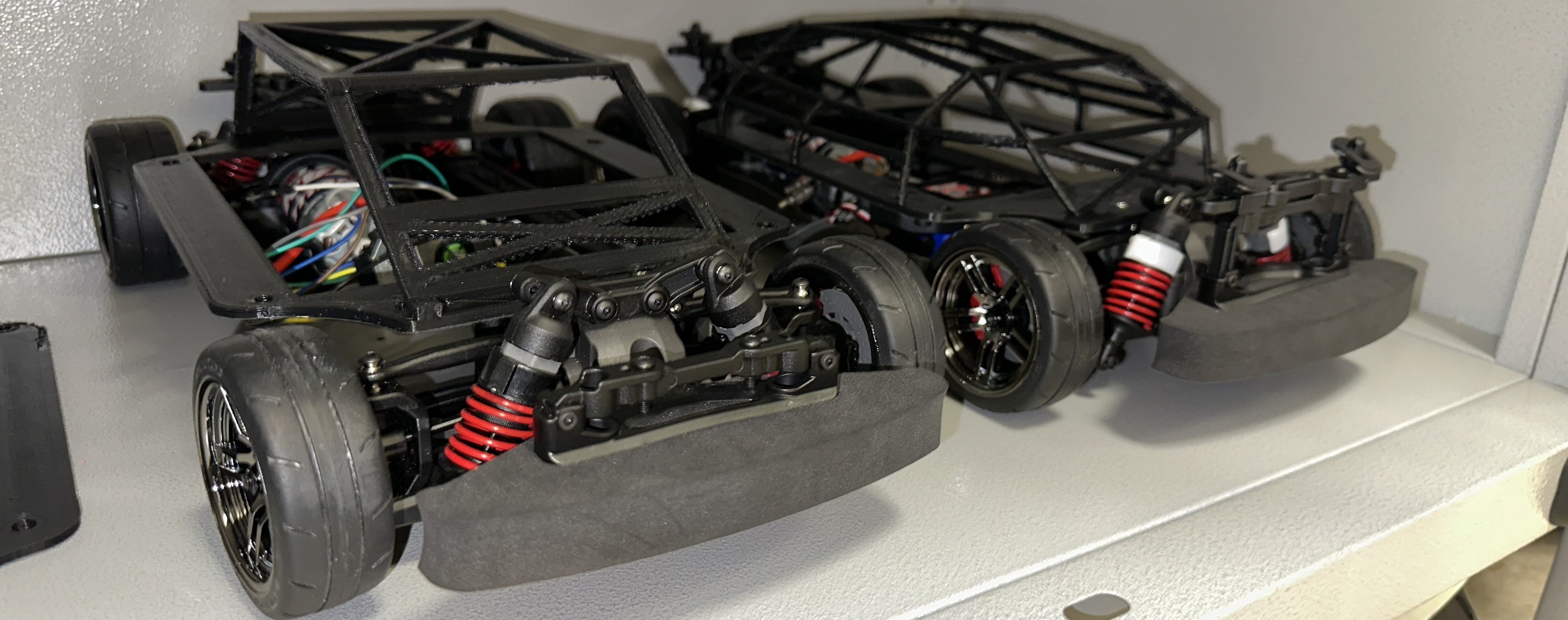
The purpose of this project is to develop a chassis for a 1/10th scale miniature self-driving racecar. Basic components of this self-driving car include a pair of cameras that sense how far objects in front of the car. A laser scanner (LiDAR) scans the area around the car is also used. A computer gathers this information and turns it into commands that control the car. This racecar is powered by a small motor through a speed controller. A speed controller is an electronic device that varies the speed of the electric motor much like a gas pedal in a car. The car steers using a servo motor which turns the wheels to the left or right like a steering wheel.
Before passenger vehicles can be sold, they must meet certain vehicle crash safety regulations to protect passengers in case of an accident. One goal of this project is to protect the self-driving components in case the remote control racecar is in a collision, just like a passenger in a car.
For the car to perform the best, it needs to be lightweight, strong, and balanced. To accomplish this goal, the car needs to have a well-designed frame - called a chassis. The chassis needs to be strong and lightweight for the racecar to be fast and maneuverable. To make the car balanced, the hardware needs to be spread all throughout the chassis. Adding too much weight on one spot will cause an imbalance. . Uneven weight distribution negatively affects how a car is able to go around corners. It is best for the weight of the components to be spread evenly throughout the chassis. The final design of this self-driving small-scale racecar features the best chassis to perform well in the F1TENTH race.