Built by Engineers,
Fueled by Innovation.
...
The Competition
Background
The Seafarer Chapter of Association for Unmanned Vehicle Systems International (AUVSI) is holding the 2016 Student Unmanned Aerial System (SUAS) competition. It challenges students to design a system capable of completing a specific and autonomous aerial operation. The goal is to stimulate and foster interest in innovation and careers in the aerospace industry.
Objectives
- Autonomous flight
- Search Area
- Automatic Detection, Localization, Classification
- Sense, Detect, and Avoid
- Air-Drop
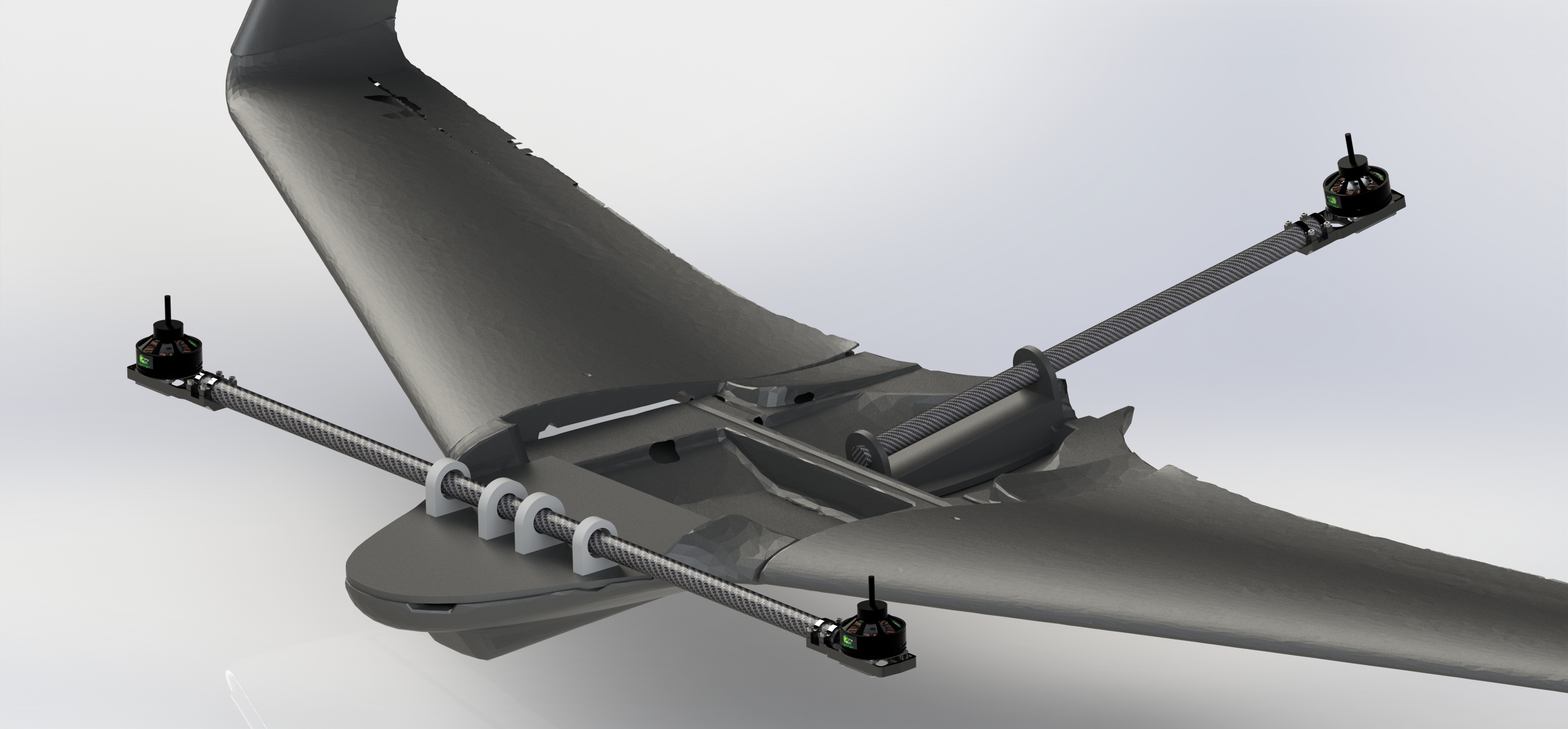
The Skyhawk
The inspiration for the design comes from the combination of a tricopter frame with a flying wing fuselage. Compared to the designs of the
previous years
and other concepts considered, the Skyhawk will be:
- Durable
- Easily replaceable parts
- Large internal capacity for hardware
- Lower Power Consumption
- Lighter
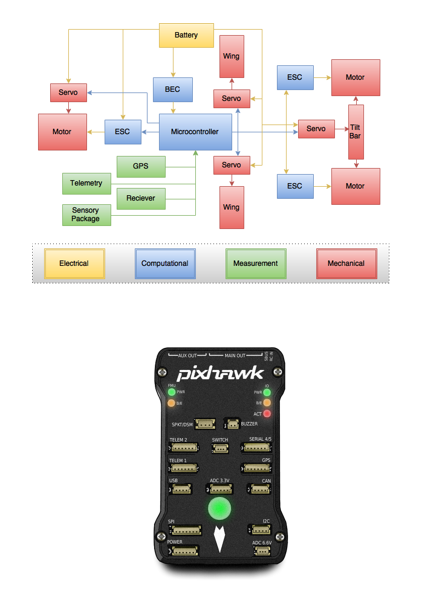
In autonomous flight, the aircraft will start in multicopter mode until it has reached a desireable altitude. The front two motors, controlled by a tilt rotor, will transition forward and set the Skyhawk into flying wing mode.
Main Components
Pixhawk
The Pixhawk is an all-in-one flight controller capable of autonomous flight, and is an essential product to include in the design. There exists a community of developers constantly adding and updating unique projects, in the form of open firmware. The Pixhawk is targeted towards high-end research, making it possible to achieve uncommon designs.
Air Frame
The Skywalker X8 is a flying wing that has the canopy space that the Skyhawk's hardware will require. This airframe will provide sufficient lift to achieve horizontal flight.
Propulsion
This propulsion system is composed of three motors, three propellers, three motor controllers, and a power supply. The motors that were chosen for this aircraft are the Cobra 4510-28 Brushless motors, these motors are 420kv motors.
Sensor Package
The PixyCam is being considered as the sensor package for this design. It is only under consideration at the moment.
Communication
For autonomous flight, the airframe will be communicating with the 3DR telemetry unit. For manual flight, a Spektrum DX8 transmitter will be used.