Team Members
FAMU-FSU College of Engineering
HOME
PROJECT OVERVIEW
Sponsor: Northrop Grumman

Thank you to our sponsor, Northrop Grumman, for their contributions to the project. We?re grateful for their support of engineering pursuits at FAMU-FSU College of Engineering.
Adviser: Camilo Ordonez

Thank you to our academic advisor, Dr. Camilo Ordonez, for his knowledge and expertise on the project.
DELIVERABLES; Reports and Documents
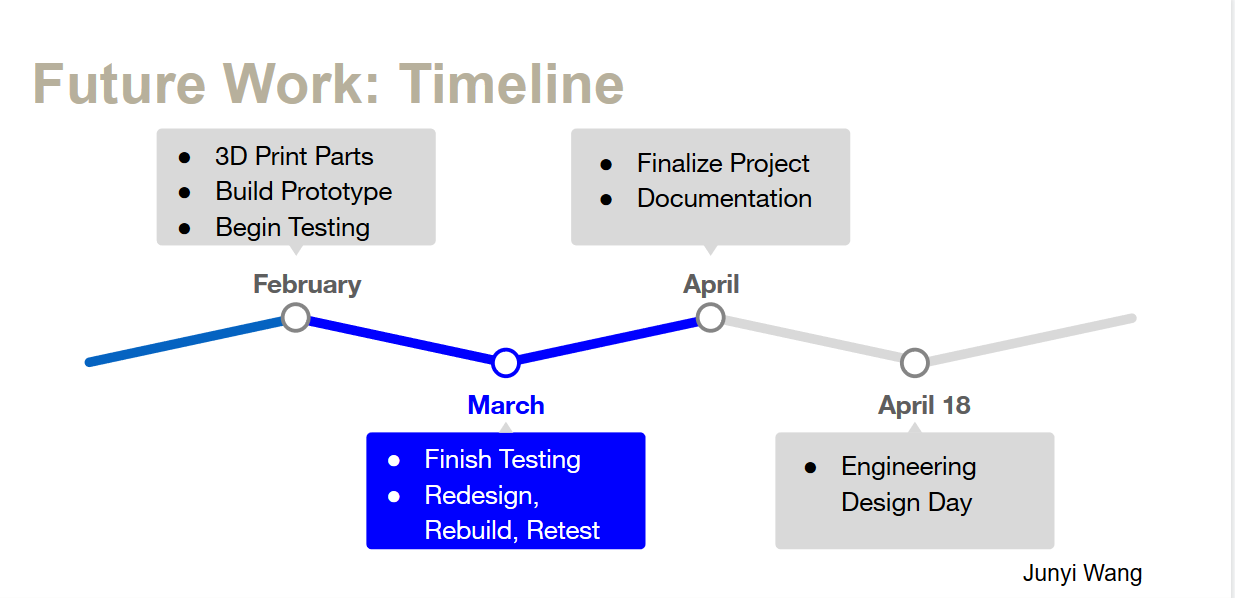
Future work

Brief description of project
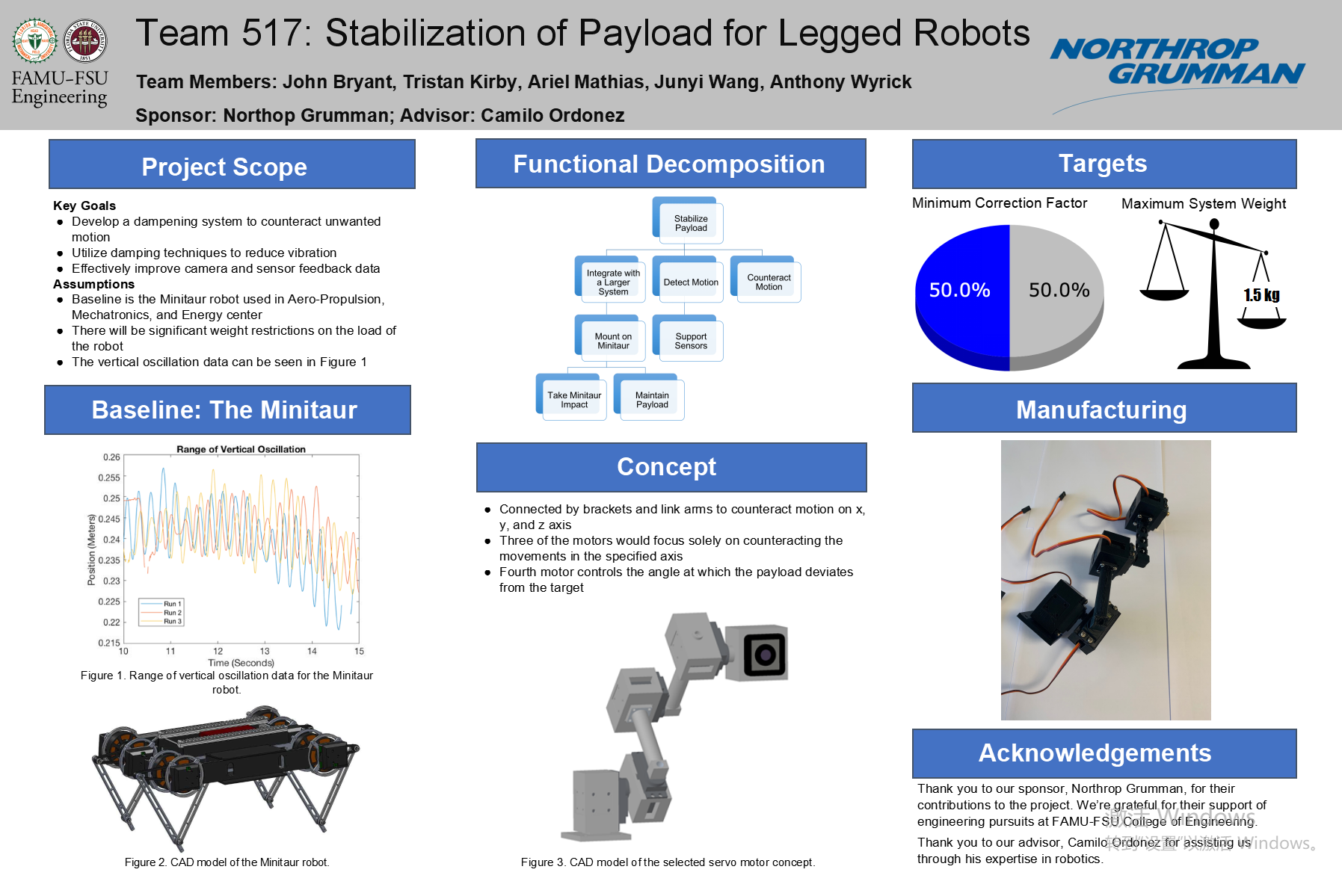
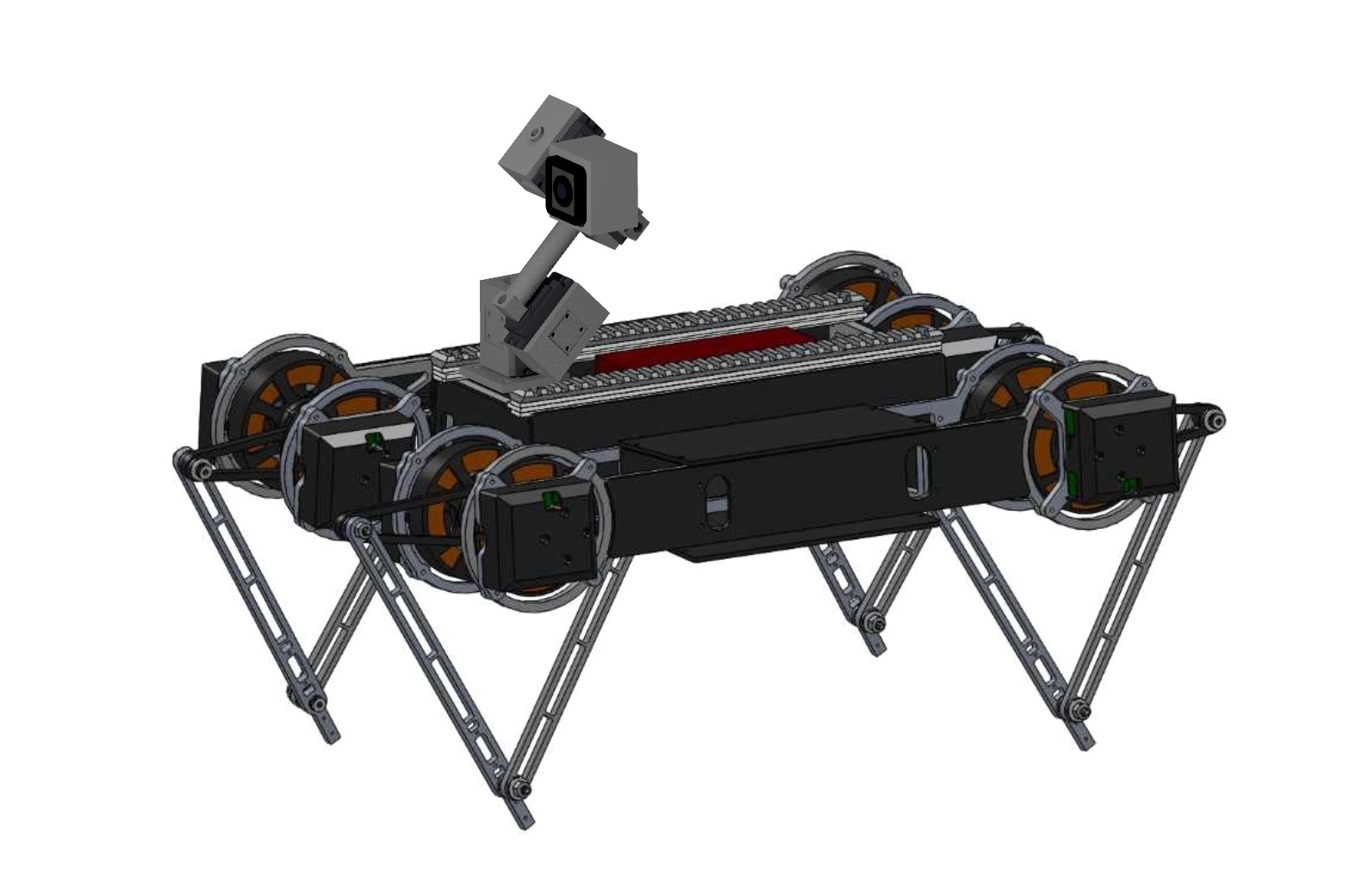
All legged robots depend on sensors, such as cameras, attached to robots so they can move. When these robots run, the motion of the robot causes the data to have noise. When data has noise, or outside disruption that effects the data quality, it is hard to interpret and not ideal. This project focuses on designing and creating a stabilization system. The system will reduce motion of the sensors on the robots. with this project, the data returned is more usable and helpful. The data is better because of reduced motion at sensor locations. The baseline of motion data for this project is from the Minitaur robot. Dr. Ordonez and David Balbuena use the Minitaur in the Aero-Propulsion, Mechatronics, and Energy Center (AME). Data collected from he Minitaur shows how much motion is acting on the sensors. The design of this project involves a mechanical system that can attach to different platforms The design is an independent system that attaches to the robot. The project uses four servo motors to counteract the motion and steady the camera. The system also uses software in combination with hardware, to actively respond to the robot motion. The motors more the system to balance the motion of the sensors. The project system's frame is 3D printed. The 3D printed frame has cutouts in the linkages to reduce weight. The linkages connect the motors and the camera. 3D printing results in a lightweight product that also improves data clarify without compromising the operation or effectiveness of the robot. The project uses a camera as the main sensor, so video from the camera shows how the project improves data. Overall, the project can be applied to different platforms and improves sensor feedback.