
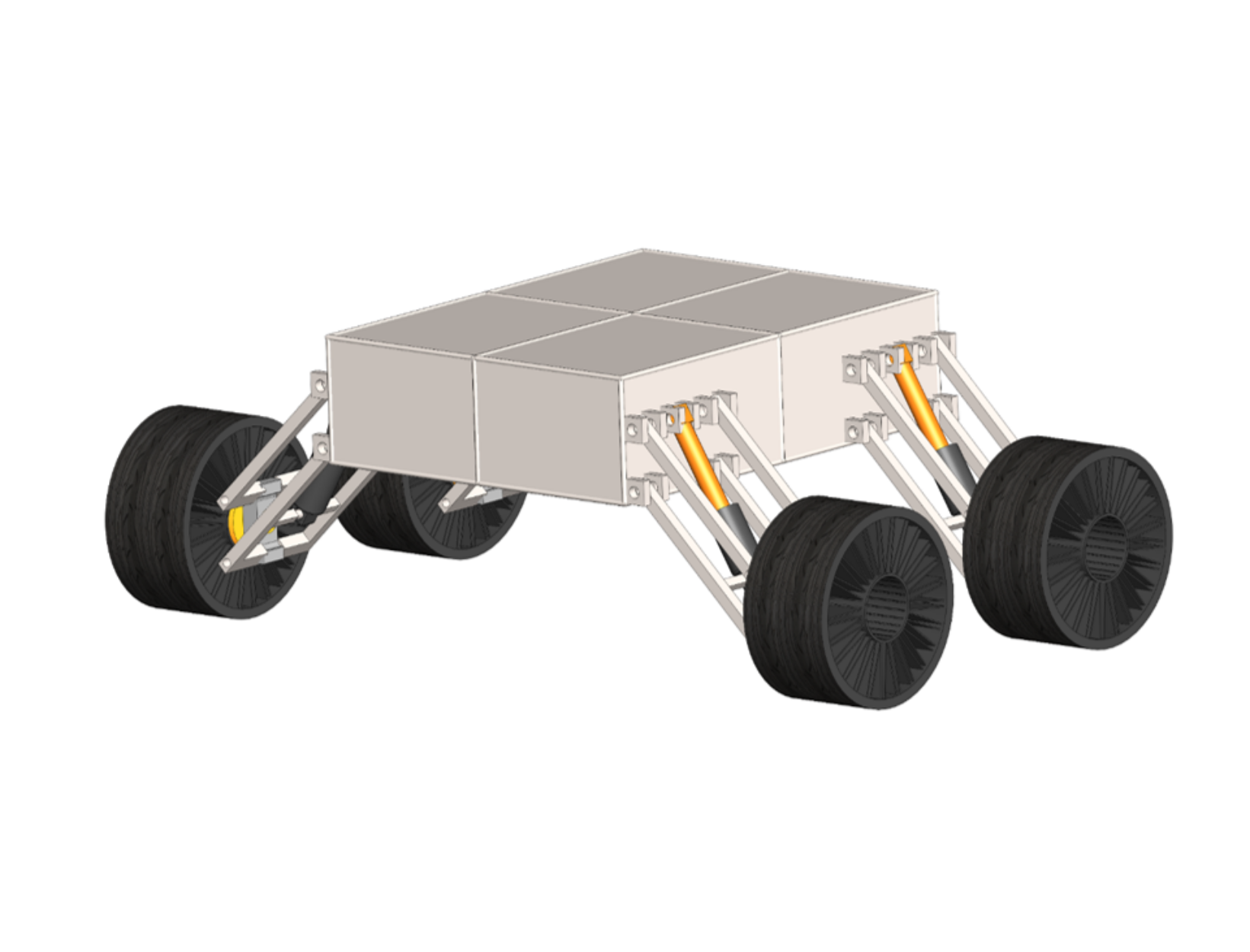
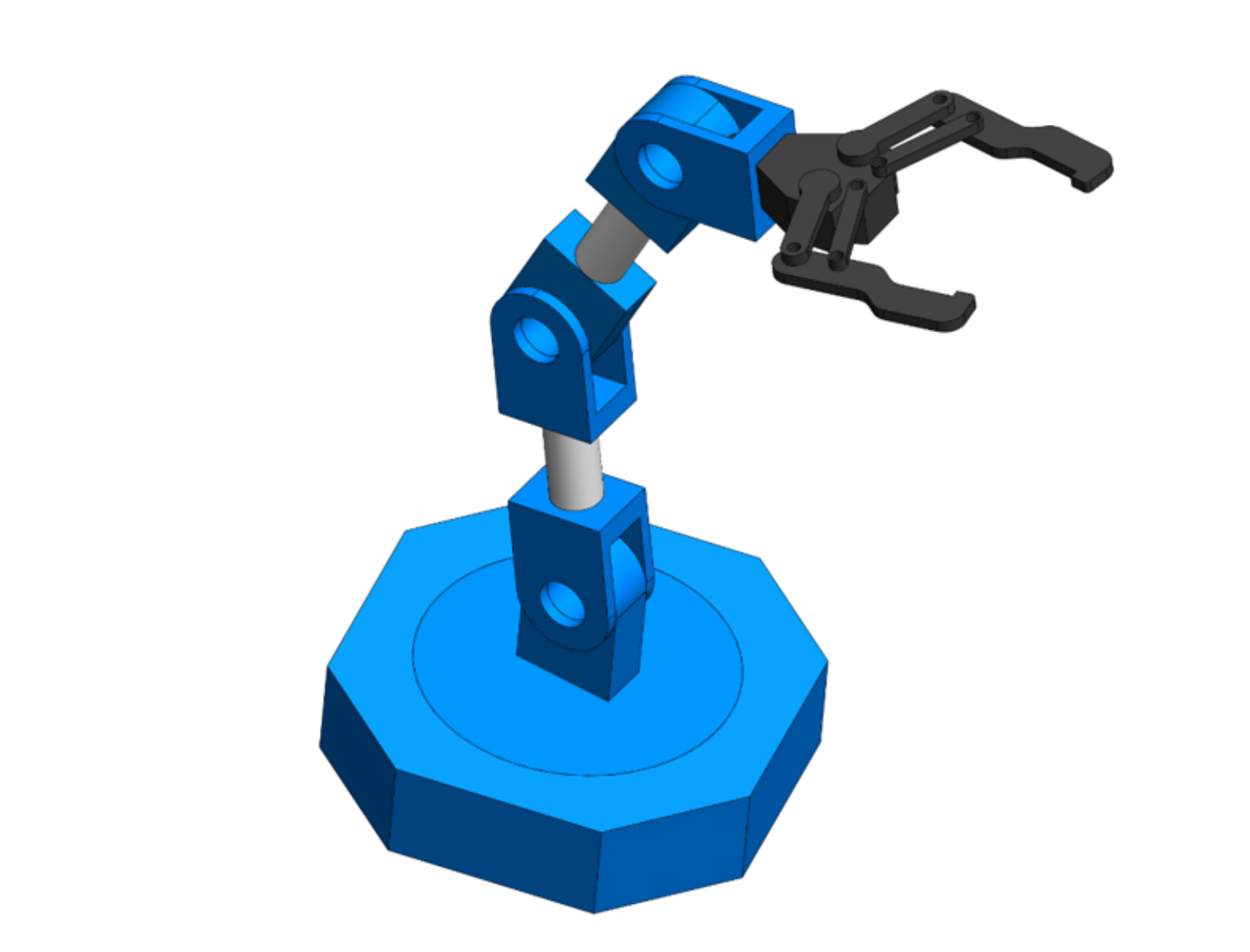
NASA wants the ability to move their lunar resources to different sites on the Moon. This is difficult because unlike on Earth, all tools must be either sent to the Moon fully built or must be built on the lunar surface. NASA's goal is to create a tool that can transport their commercial payload to nearby locations on the lunar surface. Team 516 is designing a device that can lift a specified payload with a maximum mass of 300 kilograms off a lunar lander. Once the payload has been lifted from the lander, the device will securely transport the payload to the desired place. The tool can traverse 1.5 kilometers across the lunar surface to NASA’s base. This includes traversing up a 15-degree incline over a distance 31 meters. The final design of the rover uses a titanium body, double A-arm suspension, aluminum mesh wheels, and a 6 degree of freedom robotic arm. The design validation is done through the Simulink model; simulations of the suspension and the robotic arm are used to validate the design. The simulation results give the parameters needed to create a scaled prototype, which acts as a physical proof of concept. The final products are the full-scale assembled simulation and a scaled prototype.

Team Members
Resources




