STRIDe Laboratory ● (850) 410 - 6563
2525 Pottsdammer Street, Tallahassee, Florida 32310
2525 Pottsdammer Street, Tallahassee, Florida 32310

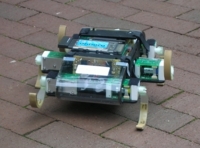
EduBot
The Edubot family of running robots are
derived from the RHex robots initially developed in 1999. The
Edubot versions are smaller, less expensive, modular in design,
and are geared toward the use in education (classroom and
research). They are currently being used in the University of
Pennsylvania's introduction to electrical and systems
engineering course.
|
Press
NSF
Sample Publications:
"Heterogeneous Leg Stiffness and Roll in Dynamic Running", Burden, S.; Clark, J.; Weingarten, J.; Komsuoglu, H.; Koditschek, D.;, Robotics and Automation, 2007 IEEE International Conference on 10-14 April 2007 Page(s):4645 - 4652
For more on Edubot, see the University of Pennsylvania's Kod*Lab Edubot page.
Videos

EduBot Platform

EduBot Demo
© STRIDe Laboratory, FAMU / FSU College
of Engineering, Tallahassee, Florida