2525 Pottsdammer Street, Tallahassee, Florida 32310

The Sprawl Family
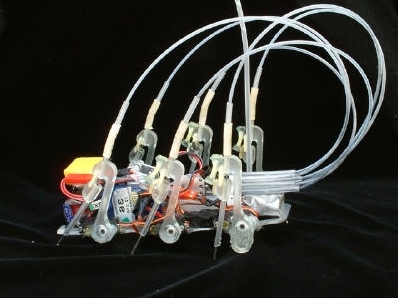
The Sprawl robots were developed as part of an ONR MURI project centered at Stanford University. As a graduate student Dr. Clark worked on the design, fabrication, and analysis of these robots. Based on locomotion principles extracted from the study of cockroaches these small (hand sized) robots are able to run at speeds up to 2.3m/s and over hip-height obstacles. The robots are built using Shape Deposition Manufacturing and the original SDM legs are still fully functional millions of cycles and years later. The early versions of the robots are pneumatically powered and operate utilizing an extremely simple open-loop controller. Dynamic stability is derived from proper tuning of the passive legs.
 Sprawlita |
As part of his thesis work, Dr. Clark developed a 3D model of Sprawlita running and used it to understand the role of leg stiffness and posture on the speed and stability of running. One of the conclusions of the study was that heterogeneous leg function leads to more stable running. |
Results from the simulation of Sprawlita running were also used to redesign the legs of a computationally autonomous version of the robot--Outdoor Sprawlita. The additional mass of the new control circuitry and battery resulted in slow, inefficient motion. The simulation-based redesign more than doubled its speed, as can be seen in the before-and-after video shown below. (Note: about half of the 4x speed difference shown in the video is due to the addition of new-low friction pistons, the rest is due to simulation-based changes in posture and leg compliance.)
| The culmination of the Sprawl family is iSprawl, a power-autonomous motor driven incarnation. iSprawl uses a novel push-pull transmission system to distribute power to is six passively flexing legs. On smooth terrain iSprawl can run at over 15 body-lengths per second. |
 iSprawl |
For more on the Sprawl Family of Robots, visit Stanford's Center for Design Research page on Sprawl, or Stanford's Biomimetics and Dexterous Manipulation Laboratory page on Sprawl.
Sprawl press:
ScienceCentral
Stanford
Sample Publications:
"iSprawl : Autonomy, and the Effects of Power Transmission", Sangbae, K.; Clark, J.; Cutkosky, M.; Department of Mechanical Engineering Stanford University, Stanford, CA 94305
"THe Effect of Leg Specialization in a Biomimetic Hexapedal Running Robot", Clark, J. E.; Cutkosky, M. R.; Journal of Dynamic Systems, Measurement, and Control, v 128, n 1, March, 2006, p 26-35.
"Fast and Robust: Hexapedal Robots via Shape Deposition Manufacturing", Cham, J.; Bailey, S.; Clark, J.; Full, R.; Cutkosky, M.; International Journal of Robotics Research, v 21, n 10-11, October/November, 2002, p 869-882.
"Stride Period Adaptation for a Biomimetic Running Hexapod", Cham, J. G., Karpick, J. and Cutkosky, M. R.; International Journal of Robotics Research, vol. 23, issue 2, February 2004.
Videos

iSprawl

iSprawl: Time Expanded

Sprawl: Off-road

Sprawlita
vSprawl Blend